EMV von DC-DC-Schaltreglern
So geht EMV-gerechtes Leiterplattenlayout
Auf fast jeder modernen Platine finden sich DC-DC-Wandler. Daher sind Vorher-Nachher-Messungen diskret aufgebauter Wandler eine gute Möglichkeit, Störquellen auf den Grund zu gehen. Für ein EMV-konformes Layout muss man allerdings wissen, warum und wo Funkstörungen entstehen.
Schaltregler zeigen oft ein breitbandiges Störspektrum zwischen 30 MHz und 400 MHz, verursacht unter anderem von den steilen Schaltflanken der MOSFETs. Deren Ausgangskapazität CDS und deren Sperrschichtkapazität sowie die Rückwärtserholkapazität (Reverse Recovery) der gleichrichtenden Schottky-Diode bilden mit den Streuinduktivität der Leiterbahnen hochfrequente LC-Schwingkreise, die durch die Schaltsspiele zum Schwingen angeregt werden.
Sind einzelne Masseleiterbahnen nicht niederimpedant, oder führen einzelne Leiterbahnzüge zwei Ströme unterschiedlicher Herkunft und koppeln dadurch über die gemeinsame Impedanz, sind entsprechend Gleichtaktstörungen (Common Mode Noise) im Design zu erwarten. Diese Störungen koppeln dann kapazitiv in Richtung Störquelle aus, um den Störstromkreis hochfrequent zu schließen.
Misst man die Störspannung, lassen sich die Schaltfrequenz des Reglers und deren Oberwellen meist bis 10 MHz beobachten. Diese treten je nach Schirmung und Leitungslänge als eine Mischung von Gleich- und Gegentaktstörungen auf. Die Ursache der Gegentaktstörungen (Differential Mode Noise) liegt im diskontinuierlichen Stromfluss im MOSFET, der dann am ESR (Equivalent Series Resistance ) der Ein- oder Ausgangskondensatoren einen Spannungsabfall verursacht.
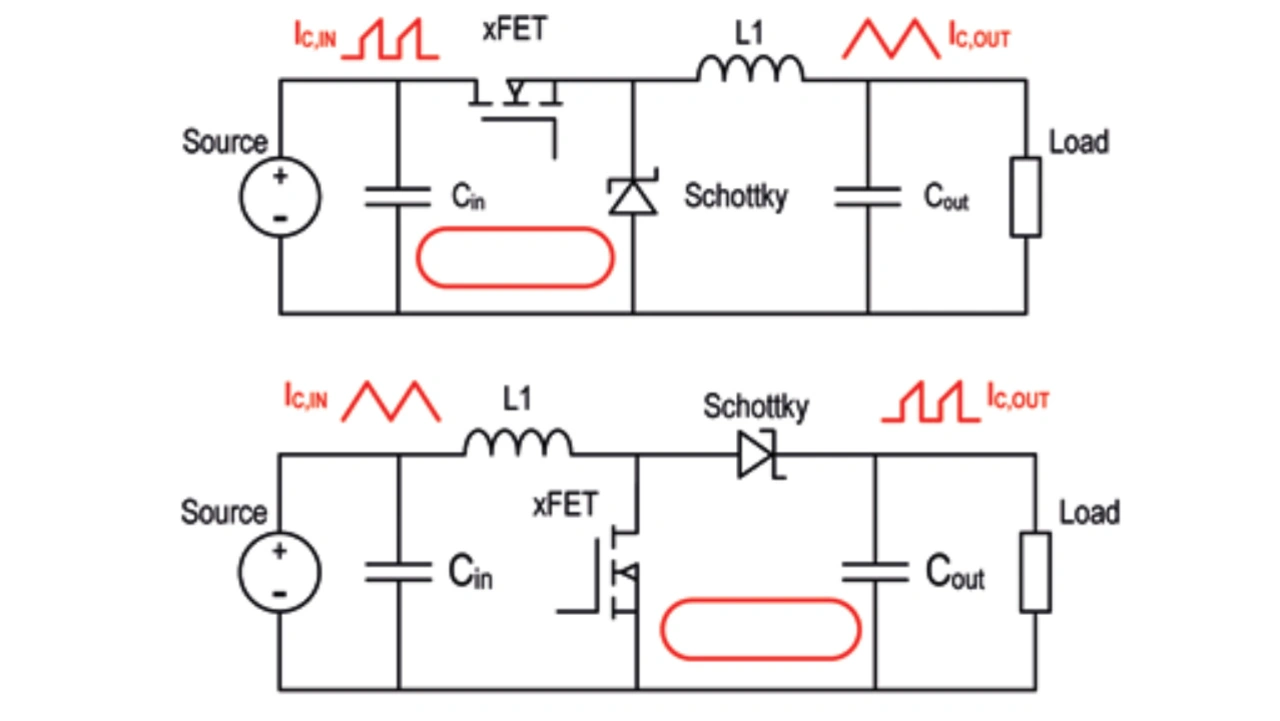
Des Weiteren ist zu beachten, dass sich die Schaltregler-Topologien dahingehend unterscheiden, ob diese Störungen bevorzugt am Eingang oder am Ausgang verursachen. Beim Hochsetzsteller (Boost Converter) ist der Ausgang kritischer, da zwischen dem schaltenden MOSFET und dem Eingang die Speicherdrossel als Bremse für den Stromanstieg (di/dt) sitzt (Bild 1 oben). Demgegenüber ist der Tiefsetzsteller (Buck Converter) am Eingang kritischer, da bei dieser Topologie die Speicherdrossel zwischen MOSFET und Ausgang platziert ist (Bild 1 unten). Somit ist leicht ersichtlich, dass ein Tiefsetzsteller vor allem ein Eingangsfilter, ein Hochsetzsteller jedoch vor allem ein Ausgangsfilter benötigt, um den diskontinuierlichen Stromfluss zu dämpfen.
Eingangs- und Ausgangsfilter
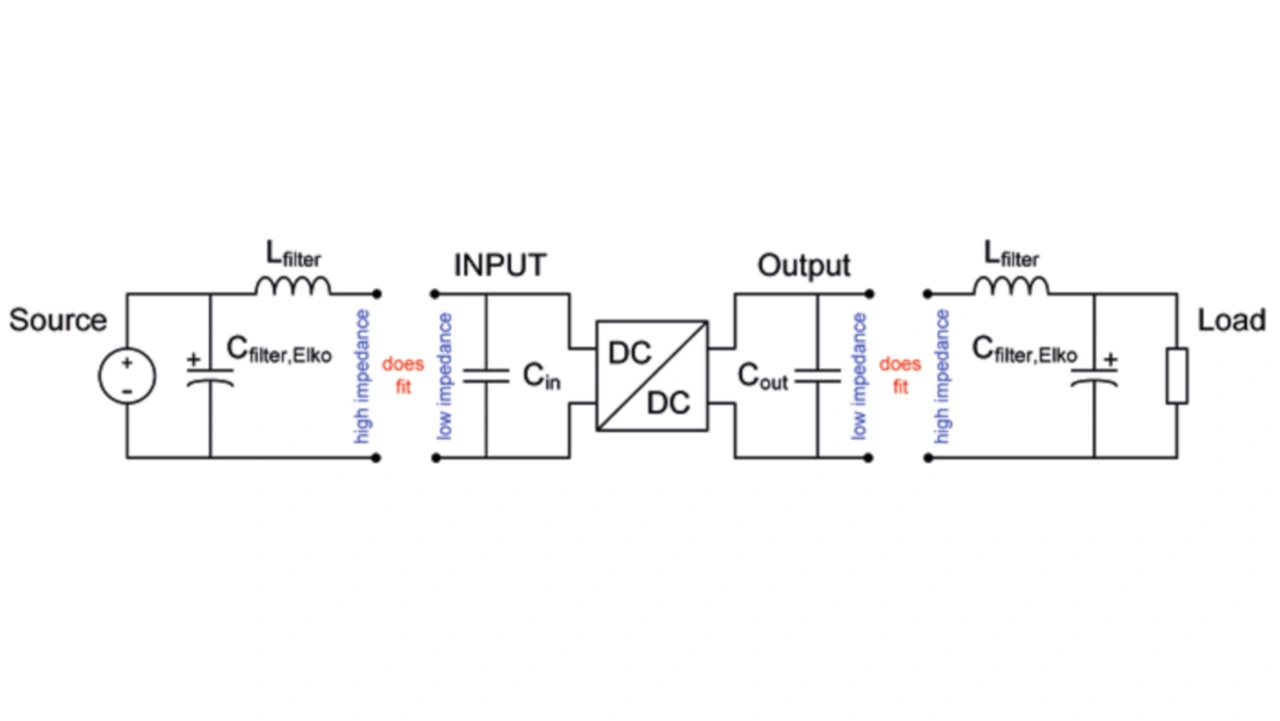
Bei modernen Schaltwandlern sind Schaltfrequenzen von 250 kHz bis 4 MHz üblich. Um die Störungen bei der Schaltfrequenz und deren Oberwellen in den Griff zu bekommen, eignen sich LC-Tiefpassfilter (Bild 2). In der Praxis sollte die Eckfrequenz des Filters auf ein Zehntel der Schaltfrequenz des Reglers gelegt werden, um deren Störamplitude um etwa 40 dB zu dämpfen.
Auswahlkriterien für die Filterinduktivitäten sind unter anderem die maximale Stromtragfähigkeit sowie die Eigenresonanzfrequenz (SRF), die mit genügend Abstand über dem zu filternden Spektrum liegen sollte. In der Praxis finden meist Induktivitätswerte zwischen 1 µH und 22 µH Verwendung, da diese Bauelemente in dem relevanten Frequenzbereich für Gegentaktstörer bereits eine ausreichend hohe Impedanz aufweisen.
Eine geeignete Maßnahme, die Impedanz des Eingangsfilters im Frequenzbereich über 10 MHz zu erhöhen, besteht darin, den LC-Filter um einen SMT-Ferritzu ergänzen . Dabei ist die Abhängigkeit der Impedanz vom DC-Strom zu berücksichtigen. Als Filterkondensatoren empfehlen sich kleine SMT-Elektrolytkondensatoren mit Werten von 10 µF bis 100 µF. Ziel in der Auslegung sollte es sein, die Filterinduktivität möglichst klein zu halten und dafür die Filterkapazität zu vergrößern. Diese Maßnahme wirkt sich positiv auf den Wirkungsgrad aus, während die Gefahr einer Instabilität aufgrund der negativen Eingangsimpedanz sinkt.
Dämpfung des Eingangsfilters
Verwendet man am Eingang keramische Vielschichtkondensatoren (MLCCs) mit Klasse-2-Keramik (z. B. X5R/X7R) als Filterkondensatoren, so wird die berechnete Eckfrequenz des Filters im Betrieb deutlich mehr abweichen oder die Restwelligkeit der Spannung stärker ansteigen, als es die reine Toleranzangabe der Bauteile vermuten lässt. Denn die Kapazität schwankt bei MLCCs mit Klasse-2-Keramiken stark mit der Spannung (DC-Bias), Alterung, Frequenz und Temperatur. Daher sollte man beim Filterdesign für Schaltregler bevorzugt Aluminium-Elektrolytkondensatoren verwenden. Deren relativ hoher ESR wirkt sich zudem positiv aus, da dieser den entstandenen LC-Schwingkreises besser dämpft als ein Kondensator mit niedrigem ESR.
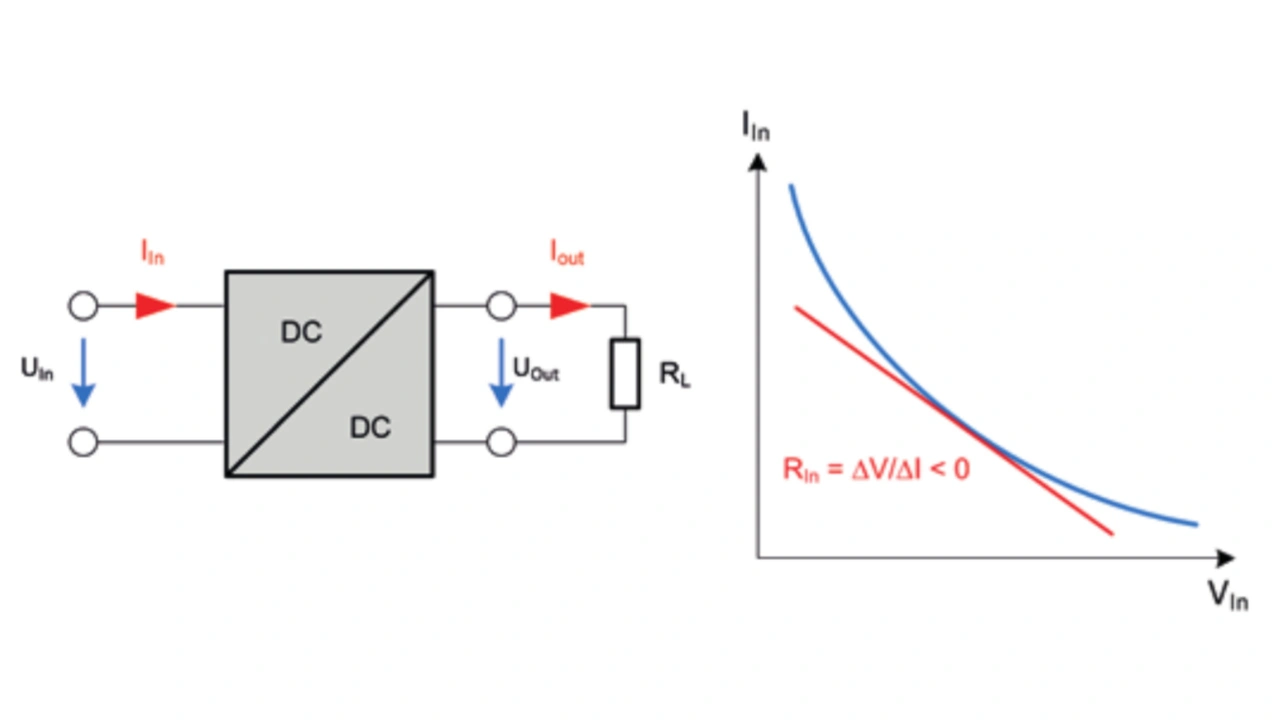
Beim Einsatz von MLCCs als Eingangskondensatoren in Kombination mit einer Filterinduktivität oder einer parasitären Zuleitungsinduktivität kann bei Spannungstransienten (z. B. abruptes Absinken der Eingangsspannung) der Eingang von Schaltreglern zu schwingen beginnen. Diese Oszillationen werden durch die sogenannte negative Eingangsimpedanz (Bild 3) in Kombination mit dem entstandenen LC-Schwingkreis verursacht. Dabei bilden die Filterinduktivität und der MLCC am Eingang einen Schwingkreis mit starker Resonanzüberhöhung. Hierbei wird der LC-Schwingkreis mit einer Restenergie gespeist, die der Wandler während der Transiente nicht aufnimmt.
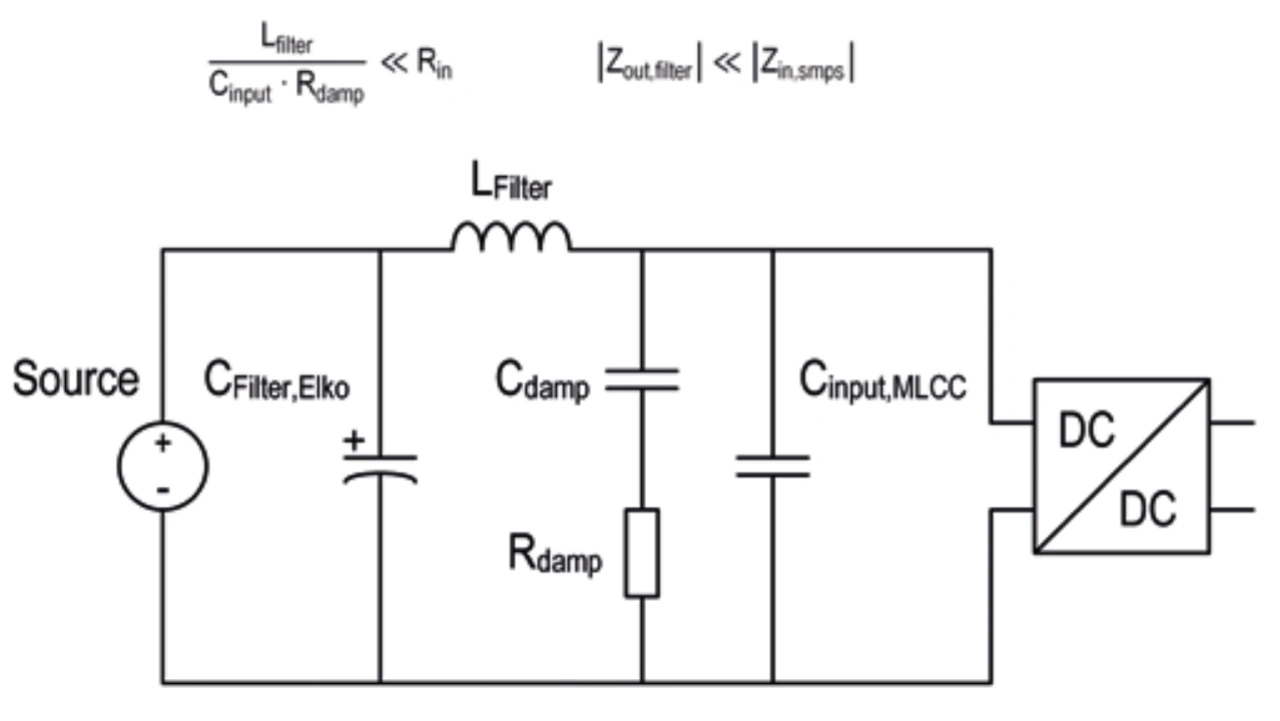
Durch eine passive Dämpfung des LC-Schwingkreises kann dieser unerwünschte Effekt vermieden werden. Dies lässt sich mithilfe eines Widerstands in Reihe zu einem Kondensator erreichen, der die DC-Spannung blockt (Rdamp und Cdamp in Bild 4). Ziel bei der Auslegung sollte eine Schwingkreisgüte Q von 1 oder ein Dämpfungsfaktor ζ (Zeta) von 0,707 sein. Je kleiner die Induktivität L und je größer die Kapazität C sind, desto geringer ist die Gefahr, dass eine negative Eingangsimpedanz entsteht, weil dadurch deren Betrag kleiner wird. Die Stabilitätskriterien in Bezug auf die Impedanzen sind ebenfalls in Bild 4 gezeigt.
Die Kapazität des Dämpfungskondensators sollte zirka viermal größer als die des Eingangskondensators sein. Der Dämpfungskondensator muss bei der Resonanzfrequenz eine geringere Impedanz aufweisen als der Dämpfungswiderstand, damit dieser die Resonanzüberhöhung des Filters effektiv dämpfen kann. Ein Dämpfungsfaktor ζ von 0,707 ist ausreichend. Mithilfe folgender Gleichung lässt sich dieser Wert berechnen, wobei n der Quotient aus Dämpfungs- zu Eingangskondensator (Cdamp/Cinput) ist:
Gängig für den Widerstand Rdamp sind je nach Güte Werte zwischen 0,1 Ω und 4,7 Ω.
Dämpfung des Ausgangsfilters
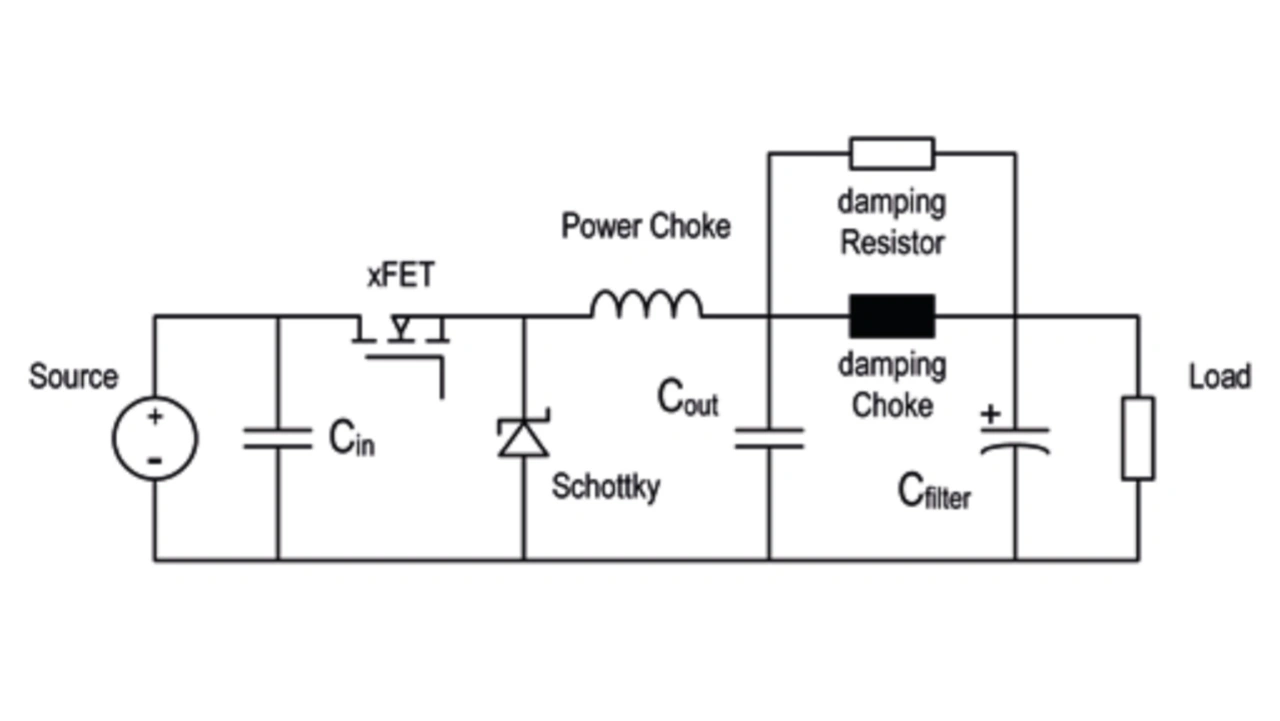
Um die Restwelligkeit der Ausgangsspannung zu verringern, eignen sich Ausgangsfilter. Liegt ein solches innerhalb des Regelschleife, müssen sich Entwickler im Vorfeld über die relevanten Eckfrequenzen des Filters Gedanken machen. Auch das Ausgangsfilter ist dann auf jeden Fall zu dämpfen, um die Stabilität der Regelschleife nicht zu gefährden (Bild 5).
Zudem ist das Kompensationsnetzwerk des Reglers neu zu berechnen, da das Filter eine zusätzliche Polstelle darstellt. Dieser Dämpfungswiderstand Rdamp lässt sich nach folgender Gleichung bestimmen:
Typische Werte für eine Filterinduktivität am Ausgang sind 0,47 µH bis 2,2 µH. Zudem sollten der Gleichstromwiderstand RDC klein und die Eigenresonanzfrequenz möglichst hoch sein. Wichtig bei der Auswahl von Rdamp ist in diesem Fall, dass dieser deutlich größer ist als der RDC der Filterinduktivität, um die Dämpfung des Filters nicht zu verringern. Anstatt einer klassischen Induktivität kann auch hier eine SMD-Ferritperle verwendet werden. Als Filterkondensator eignen sich kompakte SMT-Elektrolyt-kondensatoren im Kapazitätsbereich von 10 µF bis 100 µF. Beim Design des Ausgangsfilters sollte aufgrund der bereits oben genannten Gründe ebenfalls auf Keramikkondensatoren mit Klasse-2-Keramik verzichtet werden.

- So geht EMV-gerechtes Leiterplattenlayout
- Zwei Designs im Vergleich