Texas Instruments
MCUs machen Roboteranwendungen definitiv leistungsfähiger
Robotersysteme automatisieren wiederkehrende Arbeitsabläufe, können komplexe und kraftraubende Bewegungen ausführen und sind auch in Umgebungen einsetzbar, die für Menschen Gefahren bergen würden. Es lohnt sich also, diese Systeme so leistungsfähig wie nur möglich zu machen.
Mit höher integrierten, leistungsfähigeren Mikrocontrollern (MCUs) ist es in Roboteranwendungen möglich, die Energieeffizienz zu steigern und Bewegungen gleichmäßiger, sicherer und exakter auszuführen, was ganz klar Verbesserungen in der Produktivität und in der Automatisierung mit sich bringt. Das gilt für viele Beispiel wie das Laserschweißen, Präzisionsbeschichtungen sowie Tintenstrahl- und 3D-Drucker, in denen eine höhere Genauigkeit, teils mit einem Fehler von nur 0,1 mm, von großer Wichtigkeit ist.
Die Anzahl der Bewegungsachsen eines Roboterarms sowie die benötigte Steuerungsarchitektur (zentral oder dezentral) entscheiden darüber, welche MCU oder welches Motorsteuerungs-IC für ein System in Frage kommt. In modernen Fabriken werden verschiedenste Roboter mit unterschiedlich vielen Achsen (d. h. mit verschieden vielen Freiheitsgraden und der Fähigkeit zur Drehung um die x-, y- oder z-Achse) eingesetzt, um die einzelnen Fertigungsphasen abzudecken. In einer Fabrik kann man deshalb die verschiedensten Steuerungsarchitekturen antreffen.
Bei der Wahl des MCU ist es wichtig, genügend Performance-Reserven für die künftige Skalierung einzukalkulieren und auch die nötige Kapazität für später hinzukommende Features einzuplanen. Werden die Skalierbarkeit und weitere Features von Anfang an berücksichtigt, kann dies dazu beitragen, den Kosten- und Zeitaufwand sowie die Komplexität des Designprozesses zu verringern.
In diesem Artikel geht es um zentralisierte und dezentralisierte Motorsteuerungs-Architekturen sowie um Designüberlegungen, die bezüglich der verwendeten integrierten Echtzeit-MCUs angestellt werden müssen. Auf die Design-Herausforderungen im Zusammenhang mit Roboterantrieben geht auch ein weiterer Fachartikel ein: »How motor drive innovations are helping solve robotic movement design challenges«.
Zentralisierte Architekturen
In einem zentralisierten System (Bild 1) ist ein MCU für die Steuerung mehrerer Achsen zuständig. Dieses Konzept empfiehlt sich mit Blick auf die Abwärme, die bei Motortreibern höherer Leistung (typischerweise oberhalb von 2 bis 3 kW) anfällt und nach großen Kühlkörpern oder Lüftern verlangt. Bei dieser Architektur werden Positionsdaten üblicherweise extern von einem Resolver-Board oder von Aggregatoren erfasst, an die wiederum die eigentlichen Positionsgeber angeschlossen sind.
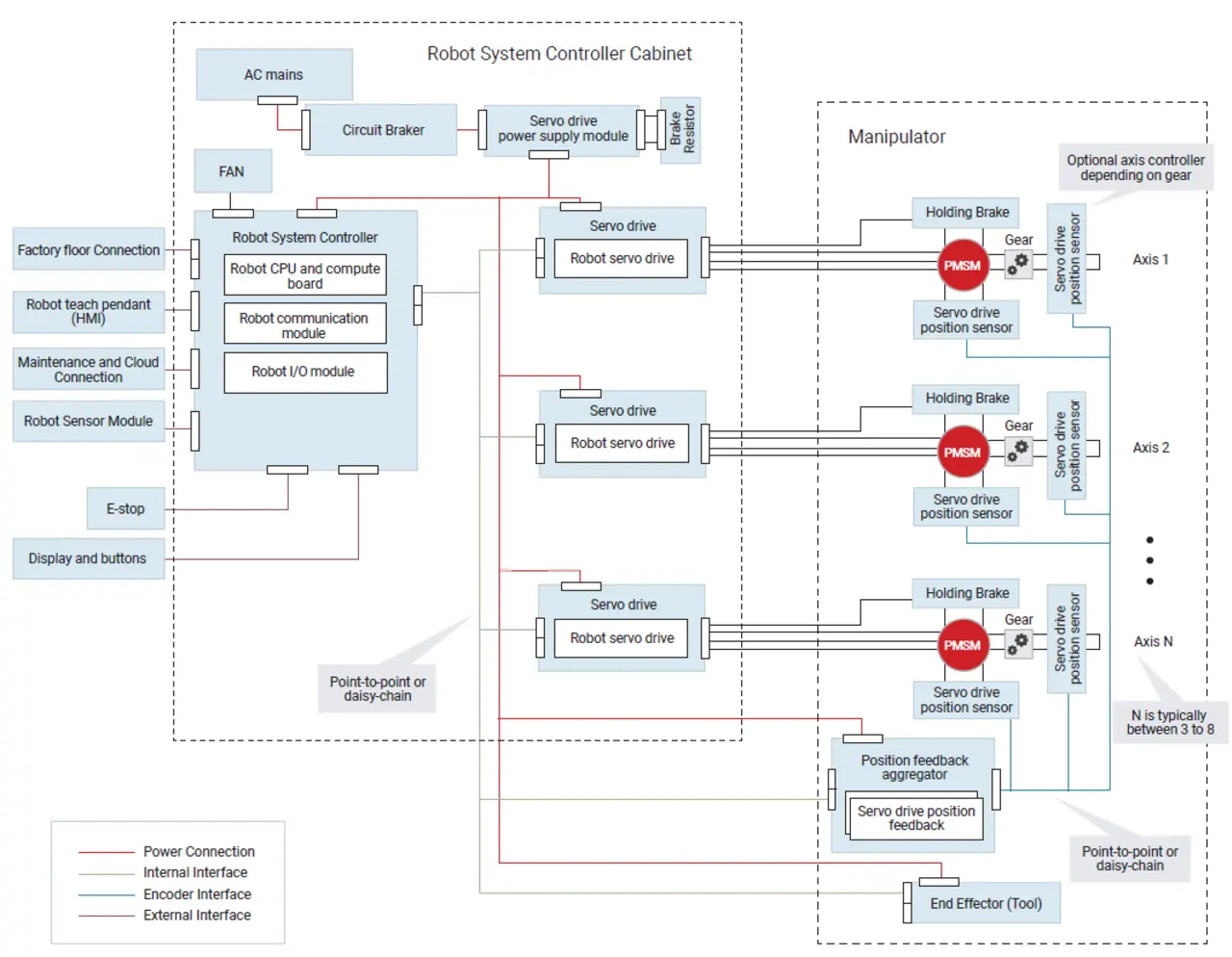
Typisch für diese Architektur ist, dass mehrere Leistungsstufen auf einer Leiterplatte oder zumindest in unmittelbarer Nähe zueinander angeordnet sind, sodass eine MCU mehrere Achsen steuern kann. Diese Vorgehensweise vereinfacht die Echtzeitsteuerung und die Synchronisation mehrerer Achsen, da keine langen Kommunikationswege zwischen verschiedenen Motorsteuerungs-MCUs existieren.
Der für die Motorsteuerung zuständige Mikrocontroller oder Mikroprozessor in einer zentralisierten Architektur muss in erster Linie leistungsfähige Echtzeit-Kerne wie etwa Cortex-R5F-Cores oder auch DSPs sowie echtzeitfähige Kommunikations-Schnittstellen (z. B. EtherCAT) und eine ausreichende Anzahl von PWM-Kanälen und Peripheriefunktionen zum Erfassen von Spannungen und Strömen aufweisen. MCUs wie der AM2432 von Texas Instruments eignen sich für skalierbare Mehrachsen-Systeme und verfügen über Chip-integrierte Echtzeitsteuerungs-Peripherie für bis zu sechs Achsen sowie über Echtzeit-Kommunikationsfunktionen.
In der Vergangenheit wurden für zentralisierte Motorsteuerungen in automatisierten Systemen hauptsächlich FPGAs oder ASICs verwendet. Der hohe Integrationsgrad und die Kosteneffektivität von Cortex-MCUs machen es aber möglich, den Performance-Anforderungen des Systems auch mit diesen Bausteinen gerecht zu werden, wodurch man beim Design zusätzlich von Skalierbarkeit und Flexibilität profitieren kann.
Zentralisierte Steuerungsarchitekturen können die Performance- und Effizienz-Anforderungen automatisierter Hochleistungs-Systeme erfüllen, genau das, was Industrieroboter mit hoher Nutzlast anfordern. Aber sie erfordern zusätzliche Kabelverbindungen zwischen dem Schaltschrank und dem am Gelenk angebrachten Motor sowie zwischen den Positionsgebern und den Aggregatoren. Diese zusätzlichen Leitungen treiben wiederum nicht nur die Kosten in die Höhe, sondern sie sind auch verschleißanfällig und wartungsintensiv.
Dezentralisierte Architekturen
In Systemen mit geringerem Leistungsbedarf haben unlängst dezentralisierte Architekturen (Bild 2) an Popularität gewonnen, in Cobots sind sie sogar zum Standard geworden.
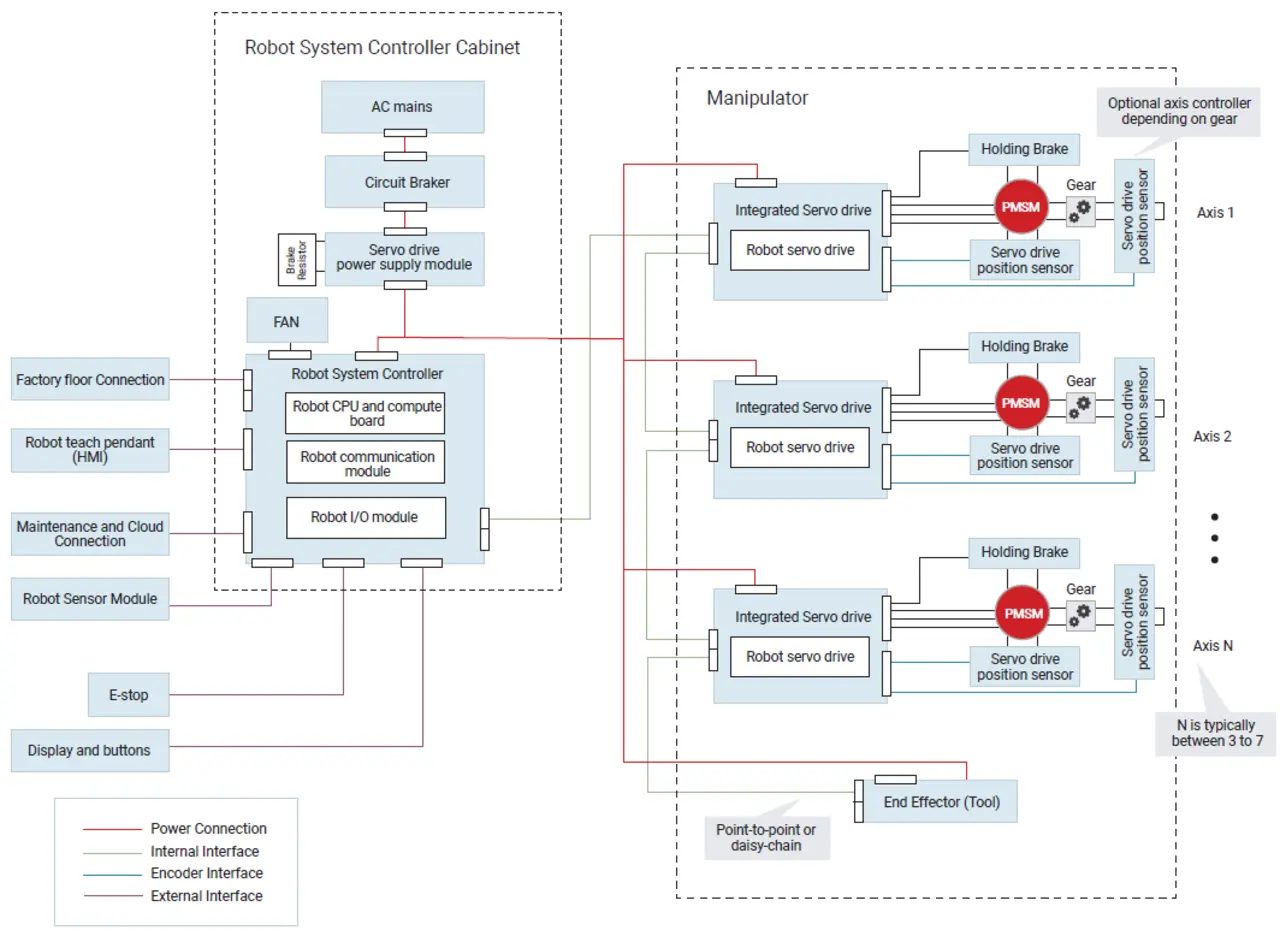
Bei dezentralisierten Architekturen ist jedes Gelenk des Roboters mit einem eigenen, einachsigen Antrieb versehen, und die Verbindung und Synchronisation der verschiedenen Achsen erfolgt über eine Echtzeit-Kommunikationsschnittstelle wie etwa EtherCAT. Jeder Antrieb ist somit meist nur für eine einzige Achse zuständig und koordiniert bestimmte Sicherheitsfunktionen ebenfalls lokal. Jede MCU benötigt deshalb nicht nur Echtzeitsteuerungs- und Kommunikationsfähigkeiten, sondern auch Motorsteuerungs-Peripherie für eine Achse, drei bis sechs PWM-Kanäle, Chip-integrierte SAR-A/D-Wandler oder Delta-Sigma-Modulatoreingänge.
In Anwendungen dieser Art ist der Positionsgeber meist unmittelbar neben der MCU angeordnet, weshalb die MCUs über eine digitale oder analoge Schnittstelle zum Auslesen des Positionssensors verfügen müssen. Obwohl diese Architektur mehr MCUs erfordert, können sich auf Systemebene erhebliche Kosteneinsparungen ergeben, da weniger Verkabelung zwischen dem Power-Bus und der Kommunikationsschnittstelle erforderlich ist. Moderne Echtzeit-MCUs wie der TMS320F28P650DK enthalten die gesamte notwendige Peripherie einschließlich der Safety-Peripheriefunktionen, sodass sich mit einem oder zwei Chips Lösungen für eine integrierte Achsensteuerung in dezentralisierten Architekturen realisieren lassen. Eine solche Lösung kombiniert ein hohes Performance-Niveau mit kleinen Abmessungen.
Zusammenfassung
Antriebsmotoren sind vielleicht nicht die spektakulärsten Komponenten in einem Roboter, und sie sind sicher nicht so »trendy« wie KI-fähige Systeme. Sie stellen jedoch gleichsam die »Muskeln« dar, die eine Fabrik am Laufen halten, und sind in der modernen Fertigung deshalb möglicherweise die wirklich entscheidenden Bauteile. Dementsprechend sorgfältig sollten die Komponenten für die Ansteuerung ausgewählt werden. Je höher der Integrationsgrad dieser Ansteuerbausteine ist, umso mehr können zusätzliche Fähigkeiten wie etwa Edge Computing und drahtlose Konnektivität Einzug in Motorsteuerungs-Designs halten.