E/E-Fahrzeuginfrastruktur
Flexibles Messtechnik-Set-up für die ADAS-Erprobung
Um automatisierte Fahrfunktionen zu realisieren, sind zuverlässige Lösungen zur Integration und Erprobung in realen Fahrszenarien erforderlich. Im Projekt AutoBit entstand ein robustes Messtechnik-Set-up für die zeitsynchrone Aufzeichnung und Verarbeitung von Sensordaten im fahrenden Fahrzeug.
Mit der Zunahme automatisierter Fahrfunktionen steigt auch der Bedarf an zuverlässigen, flexiblen und kosteneffizienten Lösungen zur Integration und Erprobung in realen Fahrszenarien kontinuierlich. Hierbei spielt die Entwicklung und Erprobung von Fahrfunktionen in Realfahrzeugen eine entscheidende Rolle, da diese realistische Daten aus realen Umgebungsbedingungen liefern, die für die Weiterentwicklung und Validierung der Systeme unerlässlich sind.
Erprobung von Fahrfunktionen in Realfahrzeugen
Die Erprobung von Fahrfunktionen in Realfahrzeugen bringt jedoch erhebliche Herausforderungen mit sich. Herkömmliche Ansätze zur Fahrzeugerprobung umfassen entweder spezifische Erprobungsträger für spezielle Funktionen oder »All-in-One«-Lösungen. Erstere sind oft finanziell nicht tragbar, insbesondere für Forschungseinrichtungen oder kleinere Unternehmen, während letztere nicht die notwendige Flexibilität für Forschung und Entwicklung bieten. Die Technische Hochschule Ingolstadt THI stand vor der Herausforderung, eine Lösung zu finden, die sowohl kosteneffizient als auch flexibel genug ist, um die Anforderungen verschiedener Forschungsprojekte zu erfüllen.
Das Projekt »Aufbau eines Versuchsträgers für die projektübergreifende Funktionsintegration« (AutoBit) wurde ins Leben gerufen, um diese Lücke zu schließen und eine offene sowie flexible E/E-Fahrzeuginfrastruktur zu entwickeln, die die Integration und Erprobung automatisierter Fahrfunktionen oder Softwaremodule ermöglicht. Die folgende Ausarbeitung zeigt die Zielsetzung von AutoBit, geht auf die technische Umsetzung sowie die Messtechnik inklusive Zeitsynchronisierung, Implementierung und Kalibrierung ein und beschreibt, welche Resultate damit erzielt werden konnten.
AutoBit als neuer Ansatz zur Fahrzeugerprobung
Die Zusammenarbeit von b-plus und CARISSMA, dem Institut für Automatisiertes Fahren (C-IAD) der THI, entstand das Projekt AutoBit. Ziel des Projekts war es, eine Fahrzeugplattform als Versuchsträger zu entwickeln, die für die Integration und Erprobung automatisierter Fahrfunktionen genutzt werden kann. Diese Plattform sollte flexibel genug sein, um verschiedene Sensoren und Steuergeräte einfach zu integrieren und dabei eine robuste Datenverarbeitung und ein effizientes Power-Management zu gewährleisten. Nach mehreren Abstimmungen wurde das finale Konzept für das Messtechnik-Set-up am C-IAD entwickelt.
Die Zusammenarbeit zwischen b-plus und C-IAD war geprägt von einer engen Abstimmung und der bestmöglichen Nutzung der Ressourcen und Expertisen aller Beteiligten. Der komplette Aufbau, die Inbetriebnahme und die Konfiguration des Set-ups erfolgte bei b-plus in Deggendorf. Gemeinsame Workshops zur Übergabe und Einweisung in das System sowie erste Tests des Systems wurden am C-IAD durchgeführt und verliefen dank der effektiven Kommunikation sehr erfolgreich.
Technischer Aufbau und Messtechnik

Sensorik und Messsysteme
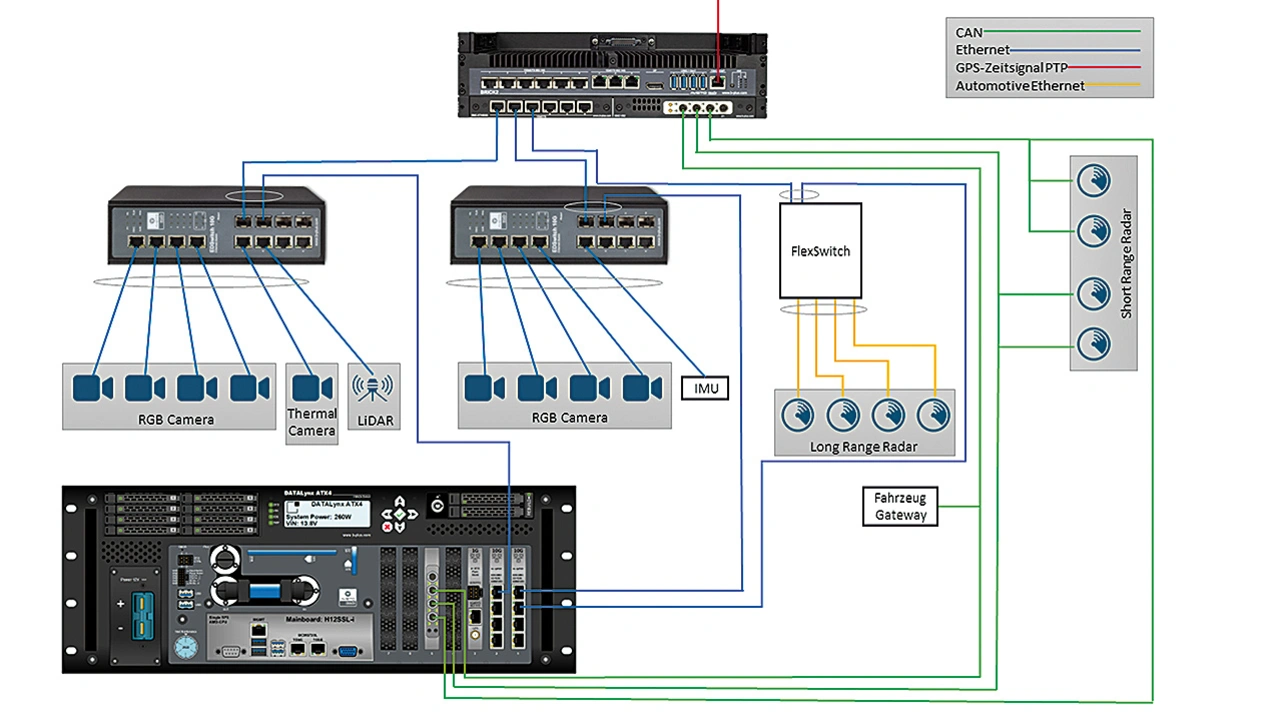
Das Herzstück des Projekts bildete ein umfassendes Messtechnik-Set-up, das eine Vielzahl von Sensoren integriert (Bild 1). Als Versuchsträger diente ein von BMW für Forschungs- und Studienarbeiten zur Verfügung gestelltes Fahrzeug (BMW M8 Competition). Die Sensoren wurden auf Basis der Anforderungen von Fahrszenarien sorgfältig ausgewählt und ermöglichen eine 360°-Umgebungserfassung. Unterschiedliche Sensortypen und überdeckende Sensorsichtfelder gewährleisten eine mindestens zweifach redundante Umgebungsabdeckung.
Die folgenden Sensoren wurden in das Set-up integriert:
- Kameras: Acht RGB-Kameras, die eine vollständige Rundumansicht des Fahrzeugs bieten, sowie eine Wärmebildkamera zur Erfassung von Temperaturunterschieden und zur Unterstützung bei schlechten Sichtverhältnissen.
- Radar: Vier Fernfeldradare, die zur Erkennung und Verfolgung von Objekten in großer Entfernung dienen, sowie vier Nahfeldradare, die für die präzise Erkennung von Objekten in der unmittelbaren Umgebung des Fahrzeugs eingesetzt werden.
- Lidar: Ein 360°-Lidar-Sensor, der eine detaillierte dreidimensionale Erfassung der Umgebung ermöglicht und dadurch eine präzise Hindernisdetektion und -vermeidung unterstützt.
- IMU und GNSS: Mittels eines Inertialsensorensystems, gekoppelt mit einem Positioniersystem, kann die genaue Position und Lage des Fahrzeugs zu jedem Zeitpunkt bestimmt werden.
- Fahrzeugschnittstelle:Über eine von BMW zur Verfügung gestellte Schnittstelle können Daten vom Versuchsträger ausgelesen oder Befehle an das Fahrzeug, zum Beispiel zur Längs- und Querdynamikansteuerung, übermittelt werden.
Diese Sensoren wurden über ein robustes Netzwerk an einen leistungsstarken Car-PC angebunden, um die zeitsynchrone Aufzeichnung und Verarbeitung der Sensordaten zu gewährleisten.
Technische Details zum Messtechnik-Set-up
- Zuverlässige Datenübertragung mit Automotive Ethernet: Für die Anbindung der Radarsensoren wurde Automotive Ethernet (BroadR-Reach) verwendet, um eine schnelle und zuverlässige Datenübertragung zu gewährleisten. Automotive Ethernet ist eine speziell für den Einsatz in Fahrzeugen entwickelte Ethernet-Variante, die eine hohe Bandbreite und geringe Latenzzeiten bietet. Diese Eigenschaften sind entscheidend für die Verarbeitung der von den Radarsensoren generierten großen Datenmengen. Durch die Verwendung von Automotive Ethernet kann zudem die robuste und skalierbare Netzwerkinfrastruktur leicht erweitert und an verschiedene Anforderungen angepasst werden. Mit Einsatz der BroadR-Reach-Technologie wurde eine homogene Infrastruktur geschaffen, die die unterschiedlichen Teilkomponenten des Netzwerks miteinander verbindet und synchronisiert.
- Effiziente Datenverteilung: Es wurden zwei Managed-Ethernet-Switches EDSwitch 10G eingesetzt, um die verschiedenen Kameras über Ethernet anzubinden und die Daten an den HPC (HighPerformance Computer) DATALynx-ATX4 weiterzuleiten. Der EDSwitch 10G unterstützt eine Datenübertragungsrate von bis zu 10 Gbit/s, was für die hohen Datenraten der Kameras unerlässlich ist. Die Kameras erfassen hochauflösende Bilder in Echtzeit, die sofort verarbeitet und gespeichert werden müssen. Der Switch sorgt dafür, dass die Datenströme effizient und zuverlässig verteilt werden, ohne Engpässe oder Verzögerungen zu verursachen. Darüber hinaus ermöglicht der Switch eine zentrale Verwaltung und Überwachung des Netzwerks, was die Wartung und Fehlerbehebung erheblich vereinfacht. Über Netzwerk-Mirroring wird ein komplettes Datensplitting zwischen dem Daten-Rekorder Brick2 und dem Datenverarbeiter DATALynx ATX4 erreicht, ohne den jeweils anderen Teilnehmer zu beeinflussen.
- Leistungsfähige Datenaufzeichnung: Das Datenrekorder-System Brick2 inklusive Brick2-Storage wurde wegen seiner notwendigen Speicherkapazität und Leistungsfähigkeit für die Aufzeichnungen der kompletten Datensätze verwendet. Das modular aufgebaute System wurde speziell für anspruchsvolle Anwendungen in der Fahrzeugerprobung entwickelt. Es zeichnet sich durch seine Robustheit und Zuverlässigkeit aus und kann in unterschiedlichen Umgebungen betrieben werden. Das Brick2-Storage-Modul verfügt über ausreichend Speicherplatz, um große Datenmengen über längere Zeiträume hinweg zu speichern. Bei Testfahrten mit mehreren Terabyte an Daten ist dies besonders wichtig. Durch die schnelle Datenübertragung können die aufgezeichneten Daten zeitnah ausgewertet werden.
- Datenverarbeitung und -analyse in Echtzeit: Der High-Performance-Computer DATALynx ATX4 wurde verwendet, um die Visualisierung, Applikationen und Tools von C-IAD zur Datenverarbeitung bereitzustellen. Speziell für die Anforderungen im Bereich der Fahrzeugentwicklung und -erprobung konzipiert, ermöglicht er die effiziente Verarbeitung und Analyse der aufgezeichneten Daten. Er verfügt über mehrere Prozessoren und eine hohe Speicherkapazität, sodass komplexe Berechnungen und Datenanalysen in Echtzeit durchgeführt werden können. Darüber hinaus bietet der DATALynx ATX4 eine Vielzahl von Schnittstellen und Erweiterungsmöglichkeiten, um unterschiedliche Sensoren und Systeme zu integrieren. Die Visualisierungs- und Analysetools von C-IAD ermöglichen es, die erfassten Daten anschaulich darzustellen und tiefgehende Analysen durchzuführen. Dies ist entscheidend für die Entwicklung und Validierung neuer Fahrfunktionen.
Zeitsynchrone Datenaufzeichnung
Ein zentraler Aspekt des Projekts war die zeitsynchrone Datenaufzeichnung, die durch den Einsatz des XTSS (Universal Time Synchronization Service) von b-plus realisiert wurde. Mithilfe des Brick-Systems von b-plus und des Precision Time Protocols (PTP) wurden die Sensordaten zeitlich synchronisiert, sodass präzise Zeitstempel gesetzt werden konnten. Diese Lösung gewährleistet eine hochgenaue Zeitsynchronisation innerhalb des gesamten Sensornetzwerks und ist entscheidend für die korrekte zeitliche Zuordnung der Sensordaten.
In verteilten Multisensorsystemen, wie sie bei AutoBit verwendet wurden, ist die präzise zeitliche Korrelation der Sensordaten unerlässlich. Die Datenpakete durchlaufen mehrere Softwareblöcke und Systeme wie Messadapter oder Ethernet-Switches, was zu Übertragungsverzögerungen und zeitlichem Taktzittern (Jitter) führen kann. Diese Effekte müssen ausgeglichen werden, um eine exakte zeitliche Zuordnung der Datenpakete zu gewährleisten. Mithilfe des Plug-and-Play-fähigen XTSS wird jedes Datenpaket mit einem präzisen Zeitstempel versehen. Sie ermöglichen auch nach Übertragungsverzögerungen eine korrekte Zuordnung der Datenpakete und bilden die Basis für die Fusion von Sensordaten.
Implementierung und Kalibrierung
Die Kalibrierung der Sensoren stellte eine der größten Herausforderungen dar. Die Sensorik wurde sowohl intrinsisch als auch extrinsisch kalibriert. Die intrinsische Kalibrierung umfasst die Bestimmung der internen Parameter der Sensoren wie Brennweite, optische Achse und Verzerrung, während die extrinsische Kalibrierung die Bestimmung der Position und Ausrichtung der Sensoren im Fahrzeug betrifft. Diese Kalibrierung erfolgte vollständig an der THI, wobei mehrere Abschlussarbeiten von Studierenden zur Unterstützung herangezogen wurden. Die extrinsische Kalibrierung wurde mittels einer Totalstation und manueller Vermessungsmethoden durchgeführt, um die genaue Position und Ausrichtung der Sensoren im Fahrzeug zu bestimmen.
Schnittstellen und Datenverarbeitung
Ein Hauptfokus lag auf der Minimierung der Schnittstellenzahl, sowohl hardwareseitig als auch softwareseitig. Ethernet wurde als bevorzugte Technologie eingesetzt, da es einfach erweiterbar, schnell und in jedem Labor nutzbar ist. Die Zeitsynchronisation erfolgte mittels PTP, während die über CAN (Controller Area Network) angebundenen Daten am empfangenden System mit einem Zeitstempel versehen wurden.
Softwareseitig wurde auf ROS2 (Robot Operating System 2) unter Ubuntu 22.04 gesetzt, um eine flexible Datenkommunikation und Verarbeitung zu ermöglichen. ROS2 bietet eine IP-basierte Datenkommunikation auf DDS (Data Distribution Service) und verfügt über eine große und aktive Community, die viele Funktionen für automatisierte Fahrfunktionen bereitstellt.
Hauptresultate des Projekts

Das Projekt konnte das Ziel eines flexiblen und robusten Messtechnik-Set-ups erfolgreich implementieren. Die gewählte Architektur ermöglicht die zeitsynchrone Aufzeichnung und Verarbeitung von Sensordaten und schafft die Basis für genaue Analysen und die Entwicklung von automatisierten Fahrfunktionen. Die ersten erfolgreichen Tests und Datenaufzeichnungen im fahrenden Fahrzeug bestätigten die Funktionalität und Effizienz des Systems.
Wissenschaftliche und praktische Anwendungen
Die entwickelte Plattform wird in verschiedenen Forschungs- und Studierendenarbeiten eingesetzt, darunter:
- Erprobung von Notbremsfunktionen: Untersuchung der Leistungsfähigkeit und Zuverlässigkeit von Notbremsassistenten in realen Fahrsituationen.
- Modellierung von Sensor-Störgrößenmodellen: Erfassung von Messdaten zur Modellierung von Gischtsituationen und anderen wetterbedingten Störgrößen.
- Parametrisierung und Training von Fahrdynamikmodellen: Nutzung der aufgezeichneten Daten zur Erzeugung und Validierung von Fahrdynamikmodellen.
- Erforschung neuer Fahrzeugarchitekturen: Untersuchung neuer Ansätze für Fahrzeugarchitekturen mit CI/CD (Continuous Integration/Continuous Deployment), Cloud-Computing, Containerisierung und Orchestrierung.
- Probandenstudien: Durchführung von Studien zum Fahrverhalten und zur Reaktion von Fahrern unter unterschiedlichen Bedingungen wie eingeschränkter Sicht oder widrigen Wetterverhältnissen.
Potenziale und weitere Forschungsansätze
Die Plattform bietet großes Potenzial für künftige Forschungsprojekte, insbesondere im Bereich der automatisierten Fahrfunktionen. Geplante Weiterentwicklungen umfassen die Optimierung der Messtechnik und Perzeption sowie die Erweiterung der Sensoren und Systemfunktionen. Weitere Forschungsschwerpunkte könnten die Verbesserung der Signalverarbeitung und die Entwicklung neuer Algorithmen für die Echtzeitdatenanalyse sein. Die Plattform bietet somit ein enormes Potenzial für die Ausbildung der Studierenden an der THI und die Erforschung automatisierter Fahrfunktionen in nationalen und internationalen Projekten und trägt so zur Gestaltung der Mobilität der Zukunft bei.
Ein Dank geht an das Bundesministerium für Bildung und Forschung für die finanzielle Unterstützung des Instituts C-IAD im Rahmen des Projekts AutoBit.
Die Autoren

Stefan Rankl
ist Business Unit Leiter Measurement Technology bei b-plus Technologies.

Thomas Hempen ist Technischer Leiter für Fahrsimulationsforschung am CARISSMA-Institut für Automatisiertes Fahren (C-IAD) der Technischen Hochschule Ingolstadt.

Prof. Dr-Ing. Werner Huber ist Professor für Integrale Fahrzeugsicherheit und Testmethoden am CARISSMA-Institut für Automatisiertes Fahren (C-IAD) der Technischen Hochschule Ingolstadt.
