Effizienz im Millimeterwellen-Radartest
Ultrabreitband-Messgerät für ADAS und AD
Komplexe Millimeterwellen-Radarsystemen für Fahrzeuge machen die gängige FMCW-Methode aufgrund der schnellen Änderungen der Chirp-Frequenz, der großen Bandbreite und der hohen Frequenzen zu einer Herausforderung in der Testphase. Eine Lösung bietet die patentierte NLTL-Technologie von Anritsu.
Millimeterwellenradar in Fahrzeugen wird zur Erkennung von Personen und Objekten in Fahrerassistenzsystemen (Advanced Driver Assistance Systems, ADAS) und Anwendungen für autonomes Fahren (Autonomous Driving, AD) eingesetzt. Zu den Sensoren, die die Umgebung außerhalb des Fahrzeugs überwachen, gehören Radar, Kameras und LiDAR (Light Detection and Ranging). ADAS unterstützen den Fahrer bei verschiedenen Fahrvorgängen, beispielsweise durch Kollisionswarnung, automatisches Bremsen oder Einparkhilfe. Beim autonomen Fahren werden die Sensordaten zur automatischen Steuerung des Fahrzeugs verwendet.
Radarsysteme und Frequenzbänder
Fahrzeugradarsysteme arbeiten in den Frequenzbändern 24 und 76 GHz. Das 24-GHz-Band wird für die Kurzstrecken- und Mittelstrecken-Überwachung der Umgebung (Front und Heck) eingesetzt, um Auffahrunfälle zu vermeiden und Kollisionsschäden zu reduzieren. Aufgrund seiner hohen Auflösung wird das 76- bis 77-GHz-Radar vor allem zur Erkennung von Hindernissen in einer Entfernung von 100 bis 200 m vor dem Fahrzeug eingesetzt.
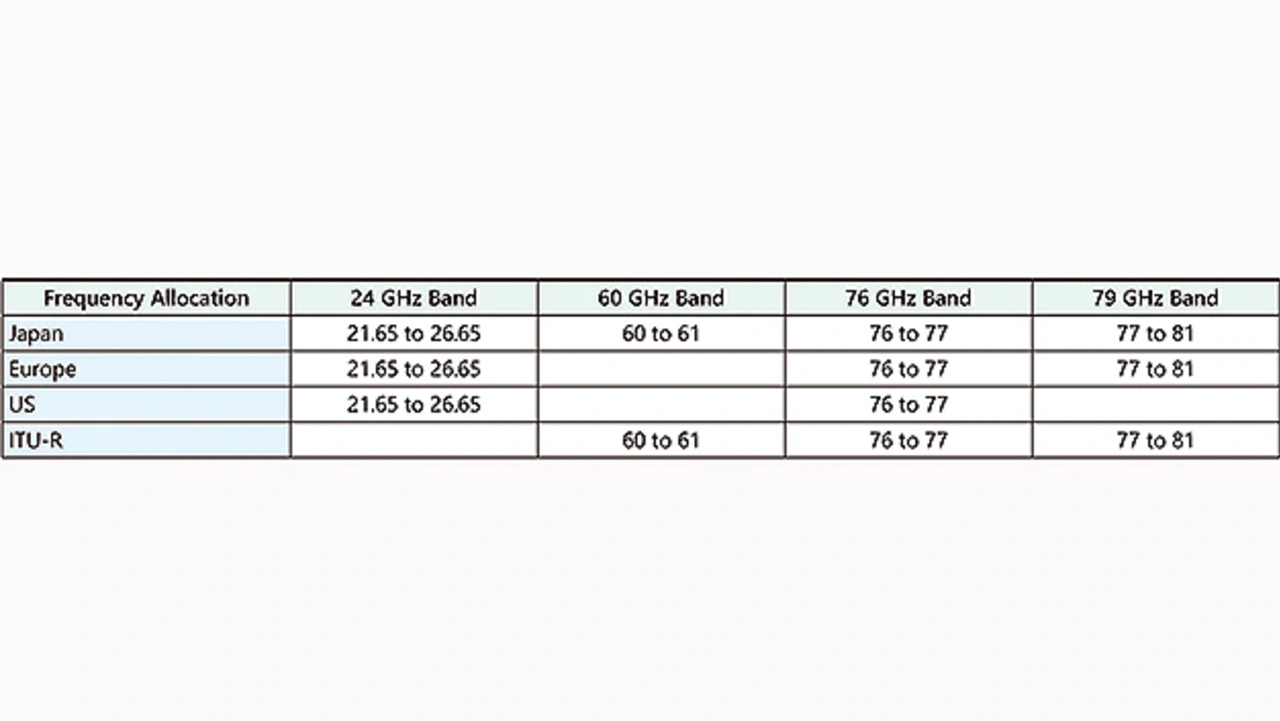
Radar kommt auch für Sensoranwendungen im Fahrzeuginnenraum (In-Cabin) zum Einsatz. So arbeiten Systeme, die verhindern, dass Kinder oder Tiere im Auto zurück- gelassen werden, im 60- bis 77-GHz-Band. Die Tabelle zeigt die Frequenzzuweisungen für Fahrzeugradarsysteme in den einzelnen Regionen.
Für Fahrzeugradarmessungen wird die Puls- oder die frequenzmodulierte Dauerstrichmethode (Frequency-Modulated Continuous Wave, FMCW) verwendet. Bei der Pulsmethode wird die Zeit gemessen, die die Funkwelle vom Sender zum Objekt und von der Reflexion zurück zum Empfänger benötigt. Sender und Empfänger sind in einem Transceiver vereint.
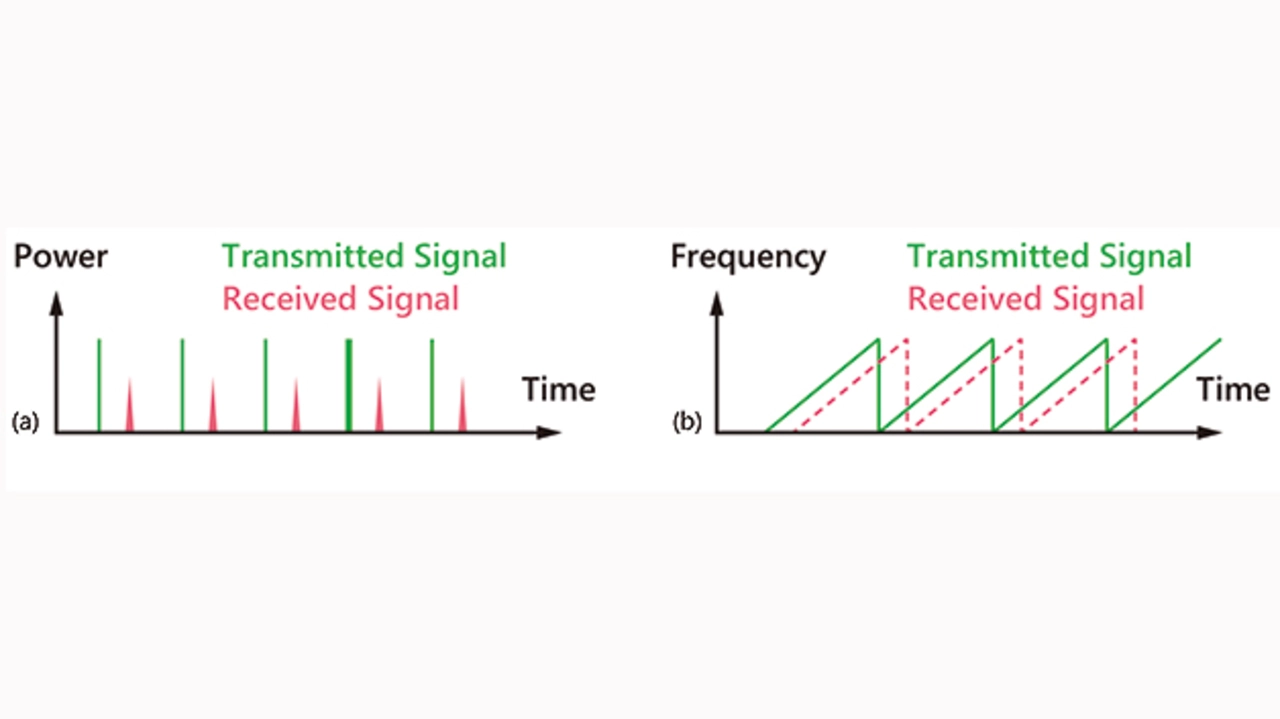
Bei der FMCW-Methode werden periodische Funksignale mit einer erhöhten Frequenz in einem bestimmten Zeitraum an ein Objekt gesendet. Hier interferieren die gesendeten und reflektierten Funkwellen und erzeugen ein Schwebungssignal. Die Analyse der Frequenzdifferenz und anderer Faktoren, die aus dem Schwebungssignal gewonnen werden, bestimmt die Entfernung zu einem Objekt und seine Geschwindigkeit. Bild 1 beschreibt die Signalmodulationsschemata für Fahrzeugradare.
Grundlagen von FMCW
Im Gegensatz zum Pulsradar bietet FMCW wichtige Vorteile wie eine geringe Sendeleistung und ein hohes Signal-Rausch-Verhältnis. Zudem ermöglicht die niedrige Reaktionsfrequenz der Transceiver-Schaltung eine einfaches Design, was die Kosten senkt. Daher findet sich das FMCW-Verfahren häufig in Fahrzeug-radarsystemen.
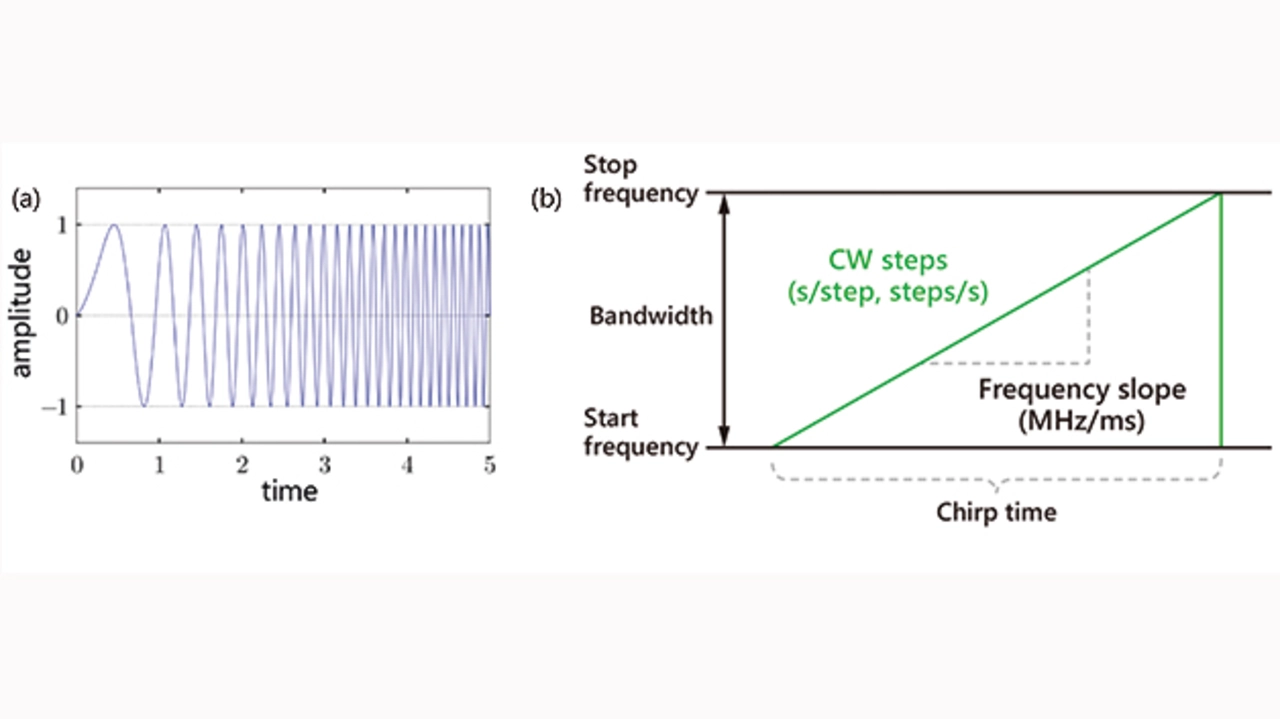
Ein Signal, dessen Frequenz linear mit der Zeit ansteigt, wird als Chirp (Compressed High-Resolution Pulse) bezeichnet (Bild 2a). Chirp-Signale sind für die Leistungsfähigkeit des FMCW-Signals von entscheidender Bedeutung. Aus dem in Bild 2b dargestellten Chirp-Signal, bei dem die vertikale Achse durch die Frequenz ersetzt wurde, lassen sich die Reichweite oder die Entfernungsauflösung und die maximale Reichweite ermitteln. Dies sind die wichtigsten Leistungsmerkmale des FMCW-Radars. Die Entfernungsauflösung Dres wird wie folgt ausgedrückt:
Dres = c/2B = c/2STc
wobei c die Lichtgeschwindigkeit, B die Chirp-Bandbreite (Endfrequenz - Startfrequenz), S die Chirp-Steigung und Tc die Chirp-Dauer ist.
Aus der Gleichung geht hervor, dass die Auflösung umso höher ist, je breiter die Chirp-Bandbreite ist. So beträgt die Entfernungsauflösung bei einer Chirp-Bandbreite von 2 GHz etwa 7,5 cm und bei einer Chirp-Bandbreite von 4 GHz etwa 3,8 cm.
Die maximale Erfassungsreichweite ist umgekehrt proportional zur Chirp-Steigung S, die die Frequenzanstiegsrate darstellt. Die maximale Erfassungsreichweite ist daher umso größer, je kleiner die Chirp-Steigung ist.
Bei einer festen Chirp-Dauer führt eine größere Bandbreite B zu einer höheren Auflösung. Dies hat jedoch den Nachteil, dass sich die maximale Erfassungsreichweite verringert, da die Chirp-Steigung mit der Bandbreite zunimmt. Dieser Kompromiss ist bei der Entwicklung von Fahrzeugradarsystemen zu beachten.
Bei Radarsystemen im Millimeterwellenbereich wird je nach Anwendung die Erfassungsreichweite oder die Auflösung priorisiert. Bei der adaptiven Geschwindigkeitsregelung ist die Fähigkeit, ein Fahrzeug aus großer Entfernung zu erfassen, wichtig, während eine hohe Auflösung nicht so wichtig ist. Bei der Kollisionsvermeidung ist dagegen eine hohe Auflösung erforderlich, da das Fahrzeug schnell auf plötzliche Änderungen im Nahbereich reagieren muss.
Aus dem Chirp-Signal lassen sich auch die Radargeschwindigkeitsauflösung vres und die maximale Erfassungsgeschwindigkeit vmax herleiten:
vres = λ/2Tc
vmax = λ/4Tc
mit der Radarwellenlänge λ = c/f.
Die maximale Erfassungsgeschwindigkeit vmax ist umgekehrt proportional zur Chirp-Dauer Tc. Eine kürzere Chirp-Dauer erhöht die maximale Erfassungs-geschwindigkeit, wirkt sich jedoch nachteilig auf die Entfernungsauflösung aus.
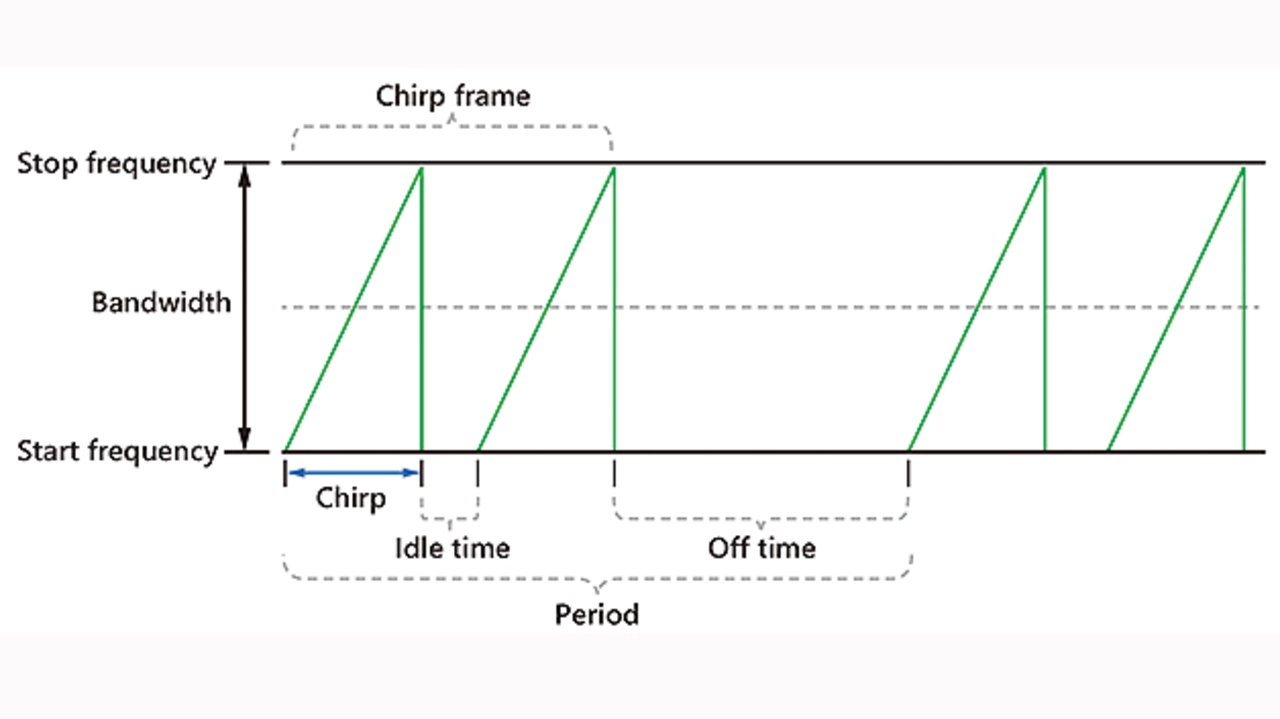
Ein Radar-Frame besteht aus einigen bis mehreren hundert Chirp-Signalen. Ein Chirp-Signal ist in Bild 3 dargestellt. Die Frame-Zeit Tf wird berechnet, indem die Anzahl der Chirps mit der Summe aus Chirp-Dauer und Wartezeit (Leerlauf) bis zum Senden des nächsten Chirp-Signals multipliziert wird:
Tf = (Tc +Twait) x N
wobei Twait die Warte- oder Leerlaufzeit bis zum Senden des nächsten Chirp-Signals und N die Anzahl der Chirps ist.
Der Grund für die Verwendung mehrerer Chirps innerhalb eines Frames besteht darin, Doppler-Informationen vom Objekt zu erfassen, um dessen Geschwindigkeit genau zu ermitteln. Zwischen den einzelnen Frames findet sich eine variable Auszeit, um die Energieeffizienz des Chipsatzes zu verbessern.
Herausforderungen bei der FMCW-Signalmessung
Faktoren, die die Messung von Chirp-Signalen erschweren, sind Chirp-Frequenzänderungen in sehr kurzer Zeit, Ultrabreitbandmodulation und höhere Chirp-Frequenz. Häufig müssen alle drei Faktoren gleichzeitig berücksichtigt werden.
Chirp-Signale werden mit einem Spektrumanalysator gemessen, der zur Bewertung der Übertragungseigenschaften von Funkgeräten verwendet wird. Es gibt zwei Arten von Spektrumanalysatoren: Wobbel-/Sweep- und Echtzeit-Spektrumanalysatoren. Ersterer basiert auf der Superheterodyn-Technik, bei der die Abtastung und Signalverarbeitung sequenziell wiederholt werden. Ändert sich die Chirp-Frequenz in einem sehr kurzen Zeitraum, kann der Wobbel-Spektrumanalysator aufgrund der sequenziellen Verarbeitung oft nicht mithalten und einige der Chirps nicht erfassen. Abschnitte, in denen der Chirp nicht erfasst wird, werden als blinde Flecken bezeichnet.
Ein Echtzeit-Spektrumanalysator, der schnelle Fourier-Transformationen nutzt, führt die Abtastung und Signalverarbeitung parallel aus und kann so kurzfristige Änderungen im Chirp-Signal erfassen. Sein Messfrequenzbereich oder die Analysebandbreite sind jedoch auf die Bandbreite des Instruments beschränkt, die einige zehn bis einige hundert MHz beträgt. Das ist im Vergleich zur FMCW-Chirp-Bandbreite für Fahrzeugradare, die von einigen zehn MHz bis zu einigen zehn GHz reicht, unzureichend. Um dies zu beheben, müssen mehrere Frequenzbereiche über die Chirp-Bandbreite gemessen und die Wellenformen zusammengefügt werden. Damit lässt sich die gesamte Chirp-Bandbreite erfassen – aber die Zeit, die für den Wechsel der Frequenzbereiche benötigt wird, kann zu einem blinden Fleck führen.
Für eine umfassende Lösung wird für die Chirp-Messung häufig eine Kombination aus einem Oszilloskop und einem Spektrumanalysator verwendet. Das Oszilloskop ist schnell genug, um die zeitlichen und frequenzabhängigen Eigenschaften des Chirps sowie die sinusförmigen Signale zu erfassen. Der Spektrumanalysator wird zur Analyse der vom Oszilloskop erfassten Wellenformen verwendet, um die Frequenzcharakteristiken zu bewerten.
NLTL-Ansatz zur Evaluierung der FMCW-Leistungsfähigkeit
Der kompakte und benutzerfreundliche Ultra-Breitband-Spektrumanalysator MS2760A von Anritsu kann die grundlegenden Eigenschaften von Millimeterwellen-Radarsignalen für Fahrzeuge messen, wie z. B. Start-/Stoppfrequenz des FMCW-Chirp-Signals, Bandbreite, Amplitude, Frame-Dauer/Periode und Anzahl der Chirps pro Frame.
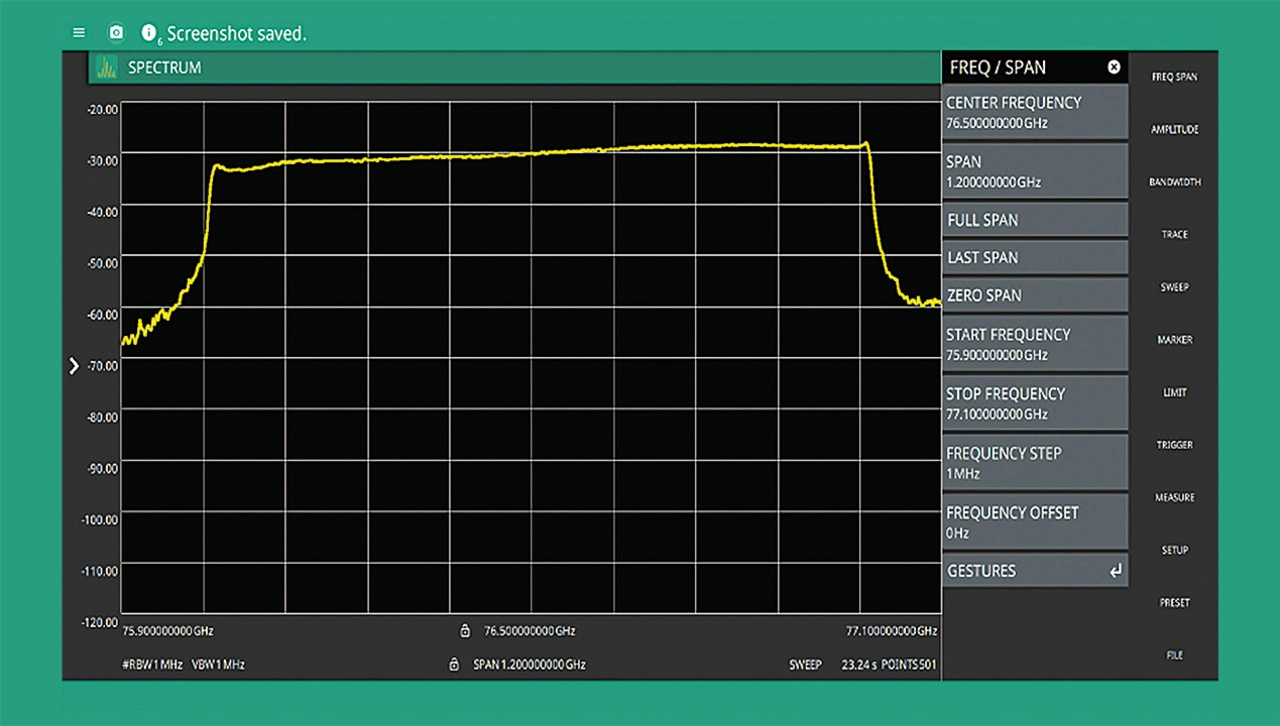
Bild 4 zeigt die Ergebnisse einer FMCW-Chirp-Messung im 1-GHz-Band zwischen 76 GHz und 77 GHz mit dem MS2760A. Das Gerät erfasst alle FMCW-Chirps in einem einzigen Durchlauf. Nach der Messung werden die Daten mit einem PC verarbeitet.
Ein Hauptmerkmal des MS2760A ist seine Fähigkeit, einen kontinuierlichen Frequenzbereich von 9 kHz bis 170 GHz für Ultrabreitbandanwendungen abzudecken. Darüber hinaus lässt sich das Gerät im Taschenformat leicht transportieren, installieren und für Messungen in der Fertigung, in Testkammern und im Feld einsetzen.
Diese Funktionen macht die patentierte NLTL-Technik (Non-Linear Transmission Line) von Anritsu möglich, die einen großen Mischer für die Abwärtskonvertierung erübrigt. Der NLTL-Shockline-Empfänger von Anritsu kann Oberwellen bei sehr hohen Frequenzen erzeugen und bis zu 170 GHz abtasten.
Fazit
Weil Millimeterwellen-Fahrzeugradarsysteme immer fortschrittlicher werden, stellt die vorherrschende FMCW-Methode aufgrund schneller Chirp-Frequenzänderungen, großer Bandbreite und höherer Frequenzen eine Herausforderung beim Testen dar. Die patentierte NLTL-Technologie von Anritsu löst diese Probleme mit einem einzigen Ultrabreitband-Messgerät, dem MS2760A. Es ist klein und eignet auch für grundlegende FMWC-Radartests, um ADAS- und AD-Anwendungen zu unterstützen.
Der Autor

Dr. Tomohide Yamazaki
Assistant Manager von Anritsu, kam 2008 zum Unternehmen. Er verfügt über mehr als zehn Jahre Erfahrung als Ingenieur für Test- und Messgeräte in der optischen und photonischen Industrie. Während seiner gesamten Laufbahn arbeitete er in der Hardware- und Softwareentwicklung und ist derzeit im Bereich des digitalen Marketings tätig.