Synchrone Aufzeichnung
Luftbrücke für Busdaten
Fortsetzung des Artikels von Teil 3
CAN over IP over WLAN
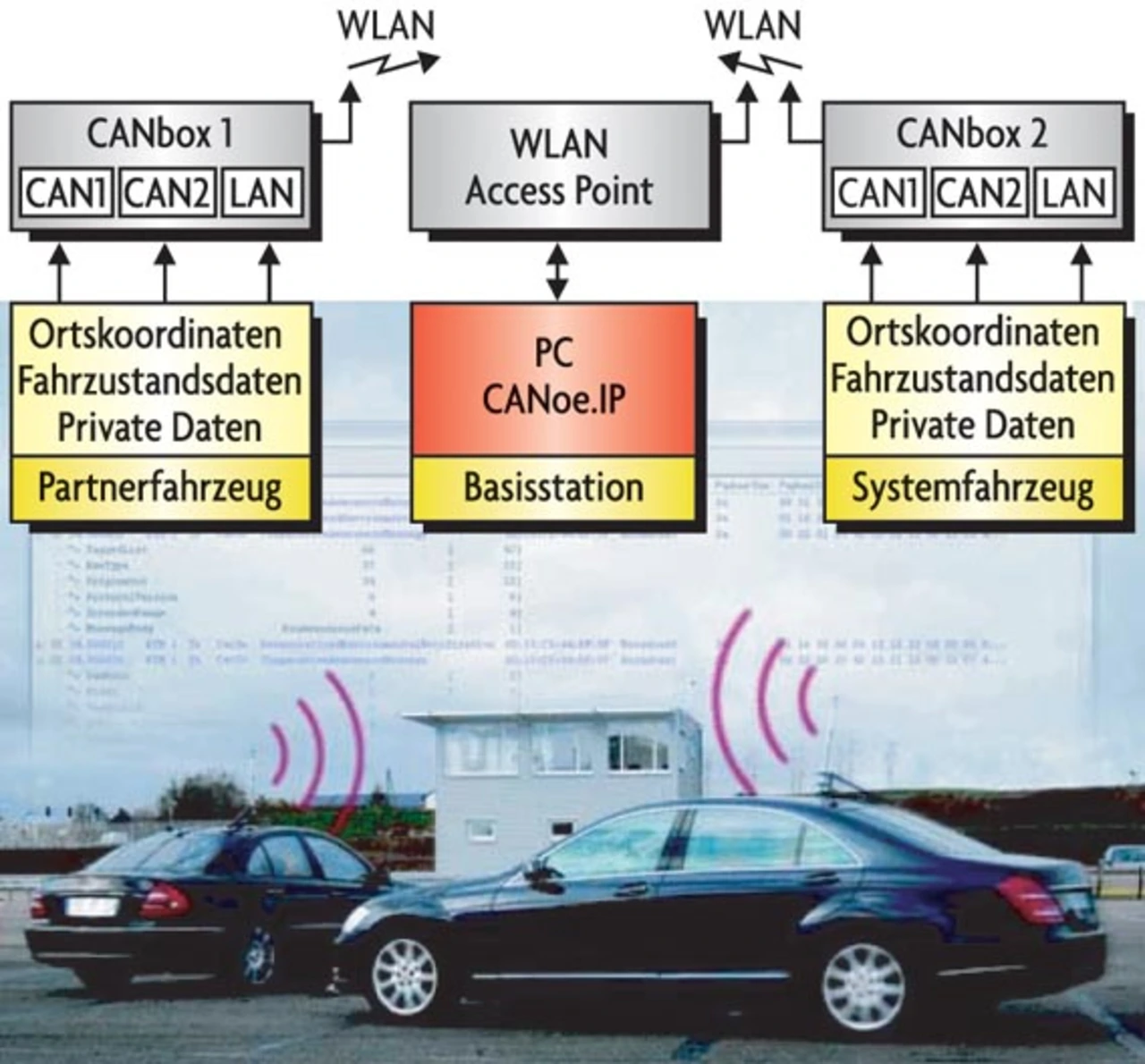
Auf Grundlage des in der Automobilindustrie weit verbreiteten Entwicklungs- und Testwerkzeugs CANoe und der dafür erhältlichen Option .IP hat Daimler gemeinsam mit der Vector Informatik GmbH eine Lösung zur drahtlosen und synchronen Busdatenerfassung mehrerer Fahrzeuge erarbeitet. Damit sind die Daimler-Mitarbeiter in der Lage, die CAN-Botschaften beider Fahrzeuge auf einer gemeinsamen Zeitbasis zu erfassen, zu speichern und zu visualisieren (Bild 3). CANoe.IP ist eine um ethernet-spezifische Funktionen erweiterte CANoe-Standardversion. Bereits letztere erlaubt eine effiziente Untersuchung mehrerer Fahrzeugbusse über Gateway-Grenzen hinweg. Hochgenau erfasste Informationen lassen sich während Messfahrten oder stationärer Tests sowohl in Echtzeit anzeigen als auch später offline analysieren.
Die IP-Programmvariante hingegen kommt bei der Entwicklung, der Simulation und dem Test von Embedded-Systemen im IP-Bereich zum Einsatz. Anders als bei der Bürokommunika-tion geht es bei Embedded-Systemen um verteilte Regelkreise, die sich statt z.B. CAN oder LIN nun eines IP-Bussystems bedienen. Unter solchen Randbedingungen kann man mit CANoe unter anderem nun auch IP-Knoten und -Gateways testen und simulieren sowie die Daten in Bildschirmfenstern grafisch anzeigen und analysieren.
Auch im Automotive-Bereich hat IP seit einiger Zeit Einzug gehalten. So lassen sich mittlerweile sogar mehrere Steuergeräte unterschied-licher Bussysteme via IP über ein Steuergerät flashen. IP begegnet Entwicklern schließlich auch in WLAN-Form, denn CAN-Botschaften lassen sich, verpackt in Ethernet-Pakete, über WLAN/Ethernet verschicken. Remote CAN ist überall dort interessant, wo man es mit schwer zugänglichen oder mobilen CAN-Bussystemen zu tun hat, beispielsweise zum Fernsteuern oder Fernüberwachen von Motorprüfständen, HiL-Tests oder der drahtlosen CAN-Datenerfassung.
- Luftbrücke für Busdaten
- Synchrone Messung über Luftschnittstelle
- Fahrroboter für reproduzierbare Manöver
- CAN over IP over WLAN
- IEEE 1588 schaltet Uhren gleich
- Erweiterte WLAN-Reichweite
- Vom intelligenten Fahrzeug zum Car-to-x-Teilnehmer
Lesen Sie mehr zum Thema
Das könnte Sie auch interessieren
Motor-Management
Steuergeräte-Parametrierung für Rennsportanwendungen
Nutzfahrzeugtechnik
Überblick über die Standardisierungsaktivitäten bei SAE J1939
Sichere Software
Entwicklung von Steuergeräte-Basis-Software nach ISO/DIS 26262
Mechatronik
Vector und Siemens bieten integrierte Lösung
Vector Informatik
Entwicklungs-Software erleichtert die Steuergeräte-Kalibrierung
Sicherheitssysteme
Luxus-Benz sieht, fühlt und handelt
Gewerbliche Nutzung
Bund fördert Daimlers E-Flottenversuch
Diagnose
ODX-Daten einfach ansehen, bearbeiten und verwalten
Zeitersparnis und neue Möglichkeiten durch…
Hardware-Simulation bei der Unimog-Reifendruckregelanlage
Car-to-x-Kommunikation:
CANoe.IP simuliert Verkehrsszenarien
AUTOSAR
Audi: Basis-Software-Module von Vector und TTTech
Vector Informatik
MICROSAR IP für Smart Charging
Busanalyse:
Vector: CANalyzer 7.2 bietet zusätzliche Stimulationsmöglichkeiten
