Software-Simulation
Steuergeräte modellbasiert entwickeln
Fortsetzung des Artikels von Teil 5
Betrachten eines Simulink-Modells in CANoe
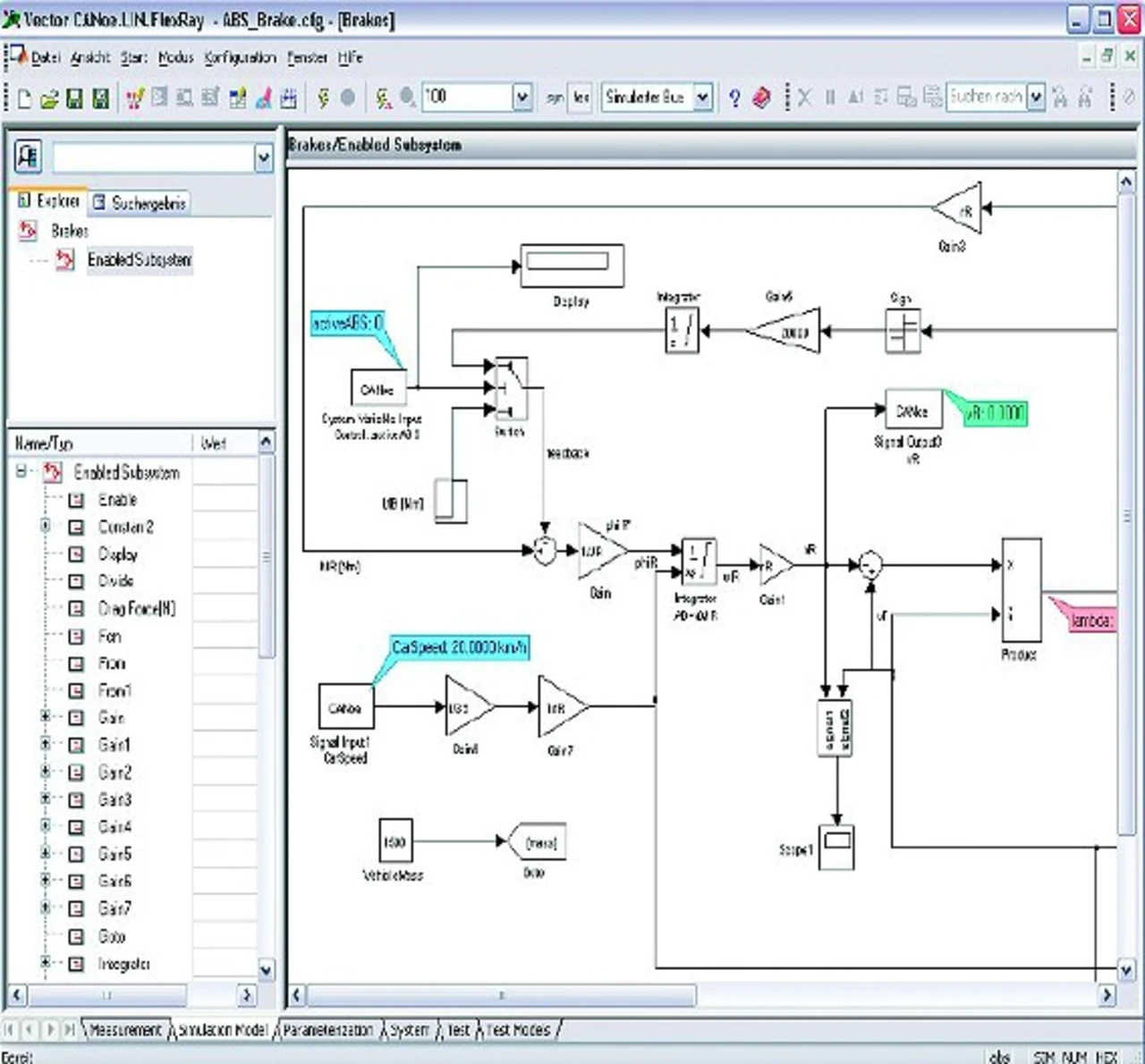
Matlab/Simulink-Modelle können in CANoe betrachtet werden, sofern sie in Form einer generierten Komponente vorliegen. Nach entsprechender Konfiguration am jeweiligen Knoten steht hierzu ein separates Fenster in CANoe zur Verfügung (Bild 4). Um das Modell nachträglich zu verändern, können alle generierten, modellinternen Parameter per Drag & Drop aus dem Modellanzeigefenster in die CANoe-Analysefenster verschoben werden. Für diese Anzeige ist keine Matlab/Simulink-Lizenz nötig.
Simulation einer aktiven Fahrwerksregelung mit einem FlexRay-Bus
Der Entwurf einer aktiven Fahrwerksregelung inklusive eines Fahrzeugmodells dient als anspruchsvolles Beispiel. Das Fahrzeugmodell soll eine ausreichend realistische Fahrdynamik nachbilden können und mit aktiven Dämpfern als Plattform für die Fahrwerksregelung dienen. Mittels der Regelung soll ein möglichst komfortables Fahrverhalten erzielt werden. Hieraus ergibt sich die Aufteilung des Gesamtmodells in zwei Hauptblöcke:
- Umgebungsmodell (Umgebungssimulation für Regler) einschließlich eines Mehrkörpermodells des Fahrzeugs (mechanisches Fahrzeugmodell), eines Modells des Antriebsstrangs (vereinfachtes Motormodell), eines Modells der Bremsen, vier Radmodellen und eines Fahrbahnmodells.
- Fahrwerksregelung einschließlich Fahrzeugbeobachter, eines übergeordneten Fahrwerksreglers und vier untergeordneten Kraftreglern für die aktiven Dämpfer.
Das Umgebungsmodell unterteilt sich in das Fahrzeugmodell und das Fahrbahnmodell. Das Fahrzeugmodell wird als Mehrkörpermodell mit 15 Freiheitsgraden entworfen. Dabei ist das Mehrkörpermodell symbolisch mit Hilfe eines Computer-Algebrasystems definiert, und daraus sind die Bewegungsgleichungen abgeleitet (ca. 4400 Additionen und ca. 20 800 Multiplikationen). Das Fahrzeugmodell bietet weitere Eingänge zur Stimulierung: Fahr- und Bremspedalstellung, eingelegter Gang, Lenkwinkel, Handbremsenstellung und Regler-Zielwertvorgabe (komfortabel oder sportlich). Die Übermittlung dieser Größen ist in CANoe mittels Systemvariablen realisiert. Dabei können die Fahrervorgaben durch ein Bedien-Panel mit entsprechenden Kontrollelementen interaktiv vorgegeben werden. Durch ent sprechende Makroaufzeichnungen lassen sich diese auch als Fahrprofil automatisiert abspielen. Das Fahrbahnmodell wird durch eine Look-up-Tabelle modelliert, die für jede Position die Höhe der Fahrbahnoberfläche und die Oberflächennormale enthält. Ebenso wird die Oberflächenbeschaffenheit durch ihren Reibwert an jeder Position beschrieben.
- Steuergeräte modellbasiert entwickeln
- Offline Mode für Rapid Prototyping
- Synchronized Mode für frühe Entwicklungsphasen
- Online Mode oder Hardware-in- the-Loop Mode
- Modellberechnung in CANoe
- Betrachten eines Simulink-Modells in CANoe
- Betrachten eines Simulink-Modells in CANoe
Lesen Sie mehr zum Thema
Das könnte Sie auch interessieren
Anforderungs-Management
Verbesserung aktueller Praktiken für ISO 26262
Nutzfahrzeugtechnik
Überblick über die Standardisierungsaktivitäten bei SAE J1939
Sichere Software
Entwicklung von Steuergeräte-Basis-Software nach ISO/DIS 26262
Mechatronik
Vector und Siemens bieten integrierte Lösung
Vector Informatik
Entwicklungs-Software erleichtert die Steuergeräte-Kalibrierung
Car-to-x-Kommunikation:
CANoe.IP simuliert Verkehrsszenarien
Entwicklung + Test
Version 1.3 von eASEE Automotive Solution steht bereit
Datenlogger:
Variantenreiche Multibus-Flotten-Logger
Vector/TTTech: Gemeinsame Steuergeräte-Software-Entwicklung
Software-Entwicklung:
AUTOSAR in der Praxis – Der Lebenszyklus von AUTOSAR-Software (Teil 2)
