Software-Simulation
Steuergeräte modellbasiert entwickeln
Fortsetzung des Artikels von Teil 6
Betrachten eines Simulink-Modells in CANoe
Die Fahrwerksregelung besteht aus einem LQ-Regler mit Beobachter. Der Regler berechnet die Sollkräfte für die aktiven Kraftelemente in den Radaufhängungen. Dabei werden im Wesentlichen zwei Regelungsziele verfolgt:
- Reduzierung der Aufbaubeschleunigungen. Ergebnis für den Pkw-Fahrer: erhöhter Komfort.
- Radaufstandsfläche konstant halten (Minimierung der Variation der Radaufstandskräfte). Ergebnis für den Pkw-Fahrer: erhöhte Sicherheit und verbesserte Fahrdynamik
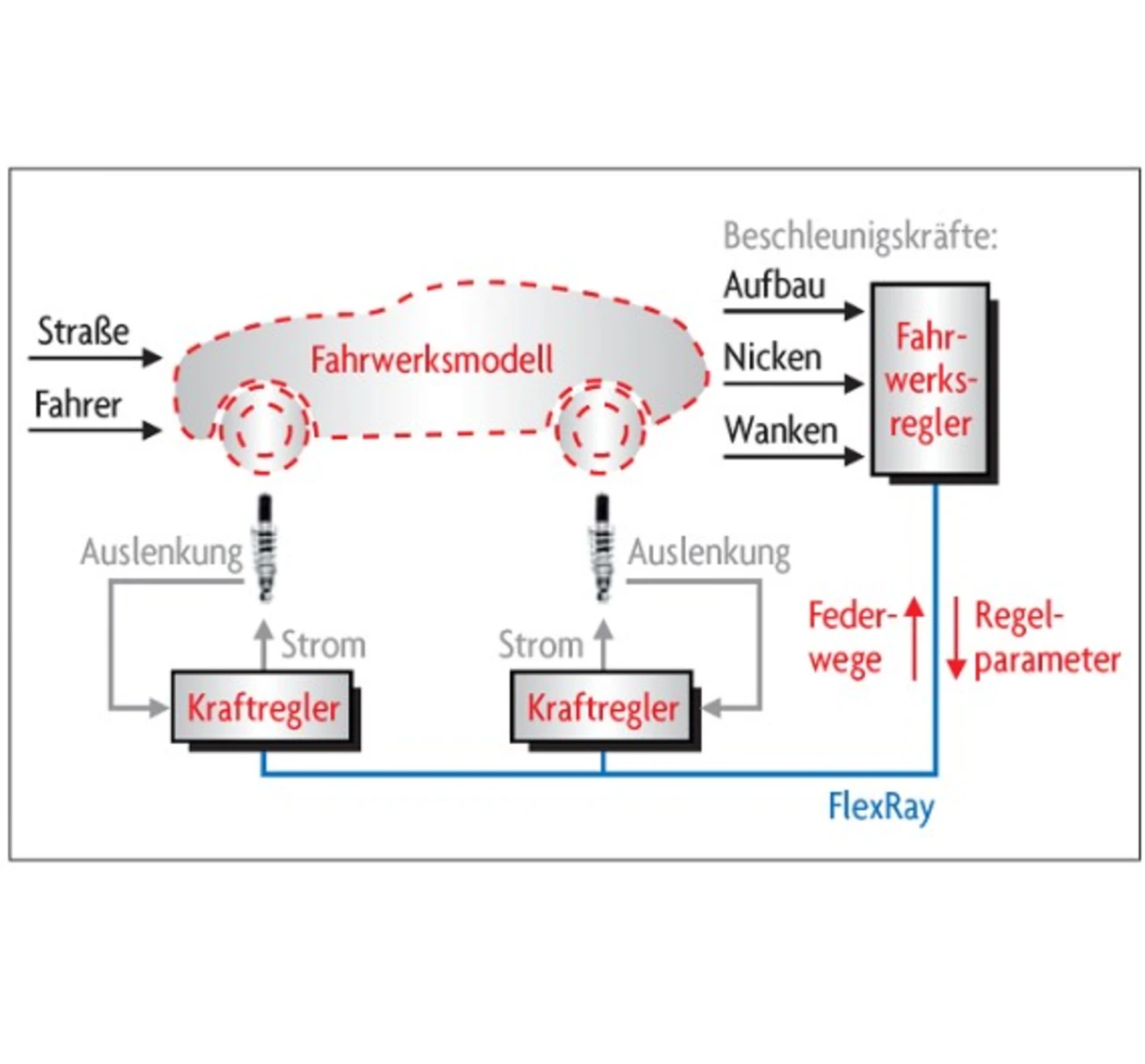
Der Beobachter rekonstruiert die nicht messbaren Fahrzeugzustände und nutzt dafür ein vereinfachtes lineares Fahrzeugmodell (sieben Freiheitsgrade). Der Fahrwerksregler benötigt die Wank- und Nickwinkelbeschleunigungen des Aufbaus aus zwei Gyro-Sensoren sowie die Hubbeschleunigung des Aufbaus aus einem Beschleunigungssensor als Messgrößen. Diese Größen werden durch die Fahrzeugsimulation zur Verfügung gestellt und in CANoe ebenfalls über Systemvariablen an den Fahrwerksregler übermittelt. Der Kraftregler regelt die Kraft der aktiven Kraftelemente auf ihren von der Fahrwerksregelung vorgegebenen Sollwert. Dieser ist beispielsweise als einfacher PI-Regler für eine Stromregelung ausgelegt.

In CANoe werden sechs Simulationsknoten definiert (Bild 5): Dies sind der Knoten Umgebungssimulation (Fahrzeugmodell mit Fahrwerksmodell), der Knoten Fahrwerksregler und vier Kraftregler-Knoten. Die sechs Knoten tauschen die vier Sollkräfte für die Kraftregler und die vier Auslenkungen der Radaufhängungen über einen FlexRay-Bus aus. Das zyklische Übertragen der Signale über einen Bus stellt im geschlossenen Regelkreis eine diskrete Abtastung mit einer Totzeit dar. Diese wirkt sich oft – aufgrund ihrer Unvorherbestimmbarkeit und ihrer Größe – negativ auf die Qualität der Regelung aus. Durch das Verwenden eines FlexRay-Busses werden diese Signale sehr zuverlässig und ohne Jitter übertragen. Zudem ist es möglich, diese Signale mit einer niedrigen Zykluszeit (2,5 bis 5 ms) zu übertragen. Dadurch ist die Qualität der Gesamtregelung gegenüber einem CAN-Bus wesentlich verbessert.
Die CANoe/Matlab-Integration ermöglicht die gleichzeitige Nutzung von Simulink zur Modellierung von komplexen Applikationsverhalten sowie die Integration des konkreten Fahrzeugnetzwerkes innerhalb des selben Entwicklungsprozesses. Der Anwender kann während der Entwicklung in seiner gewohnten Matlab/Simulink- Umgebung arbeiten und muss sich nicht um netzwerkspezifische Details kümmern.

- Steuergeräte modellbasiert entwickeln
- Offline Mode für Rapid Prototyping
- Synchronized Mode für frühe Entwicklungsphasen
- Online Mode oder Hardware-in- the-Loop Mode
- Modellberechnung in CANoe
- Betrachten eines Simulink-Modells in CANoe
- Betrachten eines Simulink-Modells in CANoe
Lesen Sie mehr zum Thema
Das könnte Sie auch interessieren
Anforderungs-Management
Verbesserung aktueller Praktiken für ISO 26262
Nutzfahrzeugtechnik
Überblick über die Standardisierungsaktivitäten bei SAE J1939
Sichere Software
Entwicklung von Steuergeräte-Basis-Software nach ISO/DIS 26262
Mechatronik
Vector und Siemens bieten integrierte Lösung
Vector Informatik
Entwicklungs-Software erleichtert die Steuergeräte-Kalibrierung
Car-to-x-Kommunikation:
CANoe.IP simuliert Verkehrsszenarien
Entwicklung + Test
Version 1.3 von eASEE Automotive Solution steht bereit
Datenlogger:
Variantenreiche Multibus-Flotten-Logger
Vector/TTTech: Gemeinsame Steuergeräte-Software-Entwicklung
Software-Entwicklung:
AUTOSAR in der Praxis – Der Lebenszyklus von AUTOSAR-Software (Teil 2)
