Die Schlüsselfaktoren im Überblick
Fortschrittliche E/E-Architekturen smart entwickeln
Automobilunternehmen brauchen heute moderne Lösungen, um mit dem Druck der steigenden Fahrzeugkomplexität und immer kürzeren Zyklen für die Produktentwicklung Schritt halten zu können. Eine zentrale Herausforderung dabei ist die Zerlegung der E/E-Anforderungen eines komplexen Fahrzeugmodells.
Kosten- und Zeitdruck auf Erstausrüster (OEMs) und Systemintegratoren in der Automobilindustrie nehmen zu. Gleichzeitig wächst die Komplexität moderner Straßenfahrzeuge. In allen Kategorien und Segmenten nimmt die Zahl der vernetzten Fahrzeugfunktionen zu, während durch die Integration grundlegender Funktionen leistungsfähigere intelligente Funktionen verfügbar werden. Diese erweiterten Fähigkeiten sind auf die Funktionstüchtigkeit der elektrischen Verkabelung und der elektronischen Komponenten angewiesen. Es werden also neue Lösungen benötigt.
Dazu gehört die Zerlegung der elektrisch-elektronischen (E/E)-Anforderungen. Die Multi-Domain-Modellierung auf der höchsten Ebene umfasst Mechanik, E/E-Architektur, Software, Hardware, Wärmemanagement und weitere Bereiche, aus denen sich das endgültige Fahrzeug zusammensetzt. Ingenieure können aus diesem Modell elektrische und elektronische Aspekte extrahieren, um die Entwicklung einer E/E-Architektur und weiterer nachgelagerter Prozesse voranzutreiben. Bei diesem Prozess müssen die verschiedenen Ingenieure, die sich mit Definition, Design und Umsetzung moderner E/E-Architekturen befassen, viele voneinander abhängige Anforderungen in Einklang bringen. Im Folgenden geht es um die Anforderungen und Designtechnologien, die Ingenieure in jeder Phase unterstützen können. Dies sind unter anderem:
➔ Topologie und Funktionszuordnung
➔ Funktionale Sicherheit
➔ Cybersicherheit
➔ Leistungsmodi
➔ Prozessor-, Netzwerk- und Gateway-Lasten
➔ Wiederverwendung von Komponenten und Software
Topologieoptimierung und Funktionszuordnung
Die meisten Konstruktionsaufgaben konzentrieren sich zu diesem Zeitpunkt im Prozess auf Optimierungen der Topologie und Funktionszuordnungen. Dazu zählen unter anderem:
➔ Verschiebung einer sekundären Netzwerkverbindung eines Steuergeräts zwischen Domänen-fokussierten Netzwerken und einer privaten Verbindung zwischen einer Untergruppe von Steuergeräten
➔ Upgrade eines Steuergeräts zur Unterstützung eines Netzwerks mit höherer Geschwindigkeit an einer oder mehreren Verbindungen
➔ Wechsel zu einer neuen Domäne, um erweiterte oder zusätzliche Funktionen einzuführen
In den vergangenen Jahren wurden zentrale Gateway- oder Multi-Bus-Architekturen durch funktionale Domänencontroller-Architekturen ersetzt, welche die Konsolidierung von Funktionen in einer geringeren Zahl von Steuergeräten unterstützen (Bild 1).
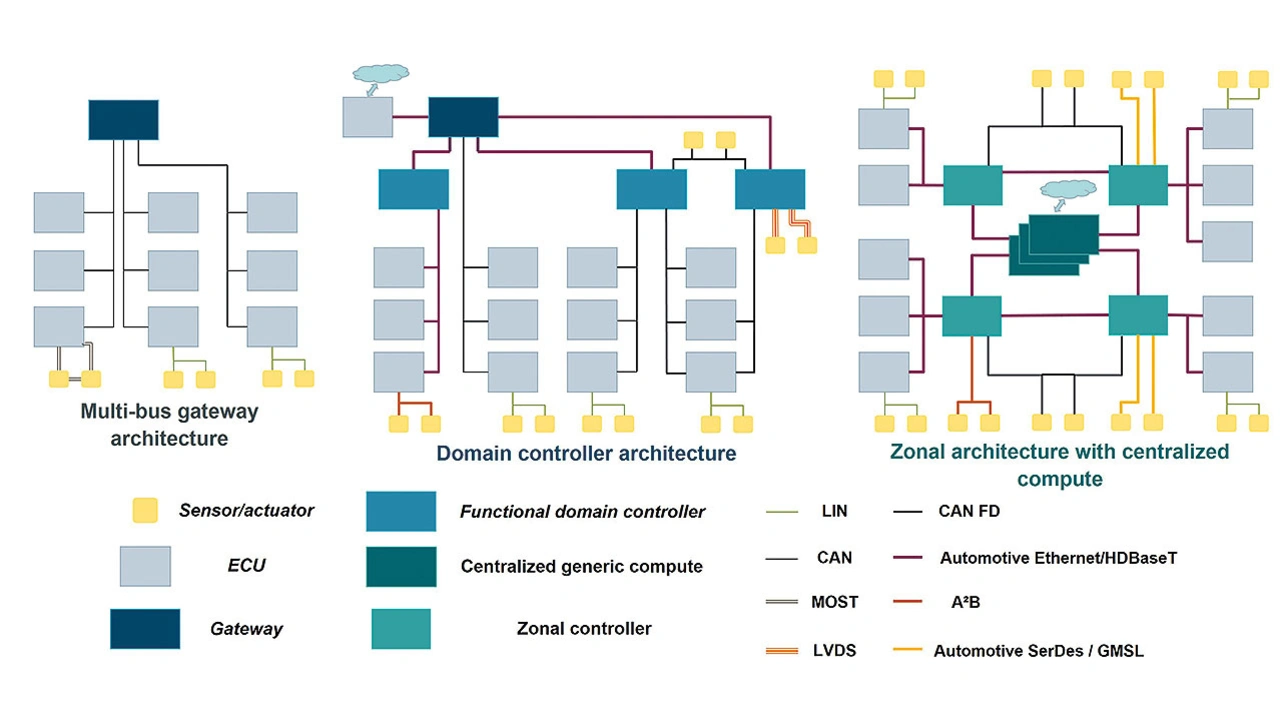
Steuergeräte werden in der Regel innerhalb einer Funktionsdomäne verschoben. Dabei werden kleinere Aktualisierungen durchgeführt, um sie an das neue Fahrzeug anzupassen. Die nächste Phase besteht darin, statt Steuergeräten allgemeinere Recheneinheiten zu verwenden, in denen die Einheiten mit den meisten Funktionen, die die höchste Leistung benötigen, zusammengefasst sind. Die zonalen Steuergeräte vereinen die übrigen Funktionen entsprechend dem räumlichen Aufbau des Fahrzeugs. Die Implementierung dieser zonalen Steuergeräte erfordert im Allgemeinen eine weitreichendere Veränderung der Software und Abstimmungen mit den Zulieferern.
Anforderungen an die funktionale Sicherheit
Anforderungen an die funktionale Sicherheit (Functional Safety, FuSa) erfordern bei der Definition der E/E-Architektur mehrere Überlegungen. Die Industrienorm ISO 26262 für funktionale Sicherheit kategorisiert Funktionen als Qualitätsmanagement (QM) oder Automotive Safety Integrity Levels (ASIL) von A bis D. ASIL-Funktionen haben das Potenzial, die funktionale Sicherheit eines Fahrzeugs im Falle eines vollständigen Funktionsausfalls zu beeinträchtigen. ASIL-A-Funktionen stellen das geringste Risiko dar und ASIL-D das größte.
Die funktionale Sicherheit eines Gesamtsystems kann auf verschiedene Weise erreicht werden. Hardware- und Softwareplattformen, die Fahrzeugfunktionen enthalten, werden auf einer spezifischen Integritätsstufe entwickelt, um die funktionale Sicherheit zu unterstützen. Eine weitere Methode ist das Hinzufügen von redundanten Elementen zum System. Anstatt ein einzelnes Sensorsystem für die Unterstützung einer ASIL-D-Funktion zu erweitern, kann es sinnvoll sein, zwei ASIL-B(D)-Sensoren zu verwenden, um Sensordaten an eine ASIL-D-Funktion zu übermitteln.
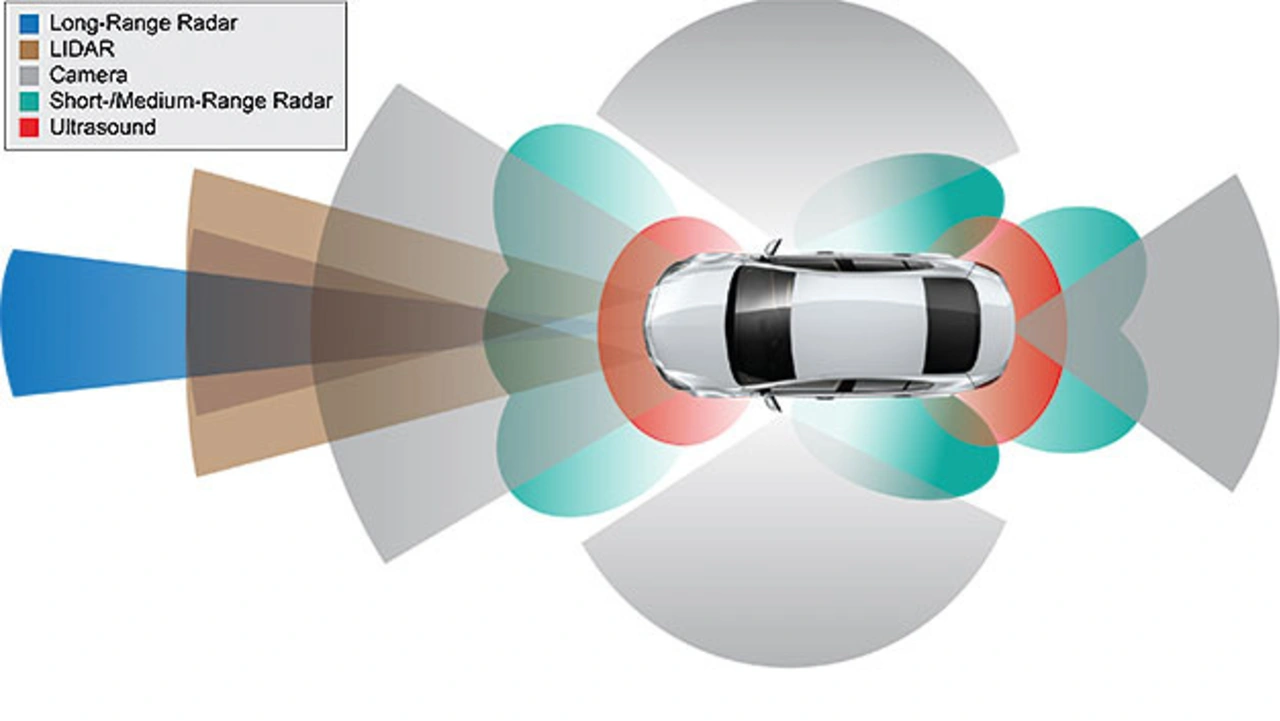
Es besteht auch ein zunehmender Bedarf, das Funktionsverhalten im Fehlerfall zu betrachten. Dies gilt insbesondere bei höherrangigen ADAS-Funktionen (3+), die umfassendere Überlegungen auf Systemebene zur Folge haben, wie zum Beispiel mehrere Redundanzebenen im Umfeld von Stromnetzen, Kommunikationsanlagen, in der Datenverarbeitung, bei Sensoren usw. Diese zusätzlichen Redundanzebenen können auch die technologische Redundanz umfassen. Die verschiedenen Sensortypen, die zur Umsetzung erweiterter ADAS-Funktionen verwendet werden, zeigen dies anhand eines anschaulichen Beispiels (Bild 2).
Cybersicherheit: Schutz vor Angriffen von außen
Während es bei der funktionalen Sicherheit um die Zuverlässigkeit von Systemen geht, muss die Cybersicherheit böswillige Angriffe auf die Fahrzeugsysteme berücksichtigen. Integrierte WLAN-, Mobilfunk-, Bluetooth-, On-Board-Diagnostik- (OBD), USB- sowie andere Anschlüsse und Verbindungsoptionen bieten potenzielle Angriffsvektoren auf die Fahrzeugkommunikationssysteme. Auch Netzwerk-Bus- Leitungen wurden als Zugangspunkte genutzt, meist für Diebstähle. Einige Systeme können den Zugang für Angreifer physisch sperren, während andere zusätzliche Prüfungen zur Authentifizierung der Software verwenden können, um unbefugten Zugriff zu verhindern. Die Entscheidung, welche dieser Cybersicherheits- und Diebstahlschutzsysteme zum Einsatz kommen, führt dazu, dass die Anforderungen über die logischen Systeme, die Sicherheitsfunktionen enthalten, an das 3D-Elektrosystemdesign kaskadiert werden.
Cybersicherheit wird durch Ansätze auf mehreren Ebenen erreicht, bei denen sich die Mechanismen an zentralen Punkten der Architektur wiederholen. Steuergeräte, die bestimmte Funktionen enthalten, müssen möglicherweise integrierte Hardwaresicherheitsmodule (HSM) umfassen. Während HSMs mithilfe von Software emuliert werden können, was einen großen Ressourcenbedarf zur Folge hat, werden immer häufiger hardwarebasierte Sicherheitsmaßnahmen eingesetzt. Als relevant für die Cybersicherheit eingestufte Daten können auch mit speziellen Schutzmechanismen ausgestattet werden, um das gesamte Cybersicherheitssystem um weitere Ebenen zu erweitern.

- Fortschrittliche E/E-Architekturen smart entwickeln
- Leistungsmodi des Fahrzeugs