Kommentar von Holger Zeltwanger, CiA
CAN in Straßenfahrzeugen
Seit Jahren ist CAN das dominierende serielle Kommunikationssystem in Straßenfahrzeugen. Holger Zeltwanger, Vorsitzender der internationalen CAN-Anwender- und -Hersteller-Vereinigung, zeigt die Errungenschaften der vergangenen 30 Jahre aus Sicht des CiA e.V. und wagt einen Blick in die Zukunft.
Die ersten CAN-Anwendungen gab es nicht – wie vielleicht erwartet – in Personenkraftwagen, sondern in der Medizintechnik, in Textilmaschinen und in Aufzugsteuerungen. CAN (Controller Area Network) war schon 1986 von Bosch der Öffentlichkeit präsentiert worden. Gut zwei Jahre später waren die ersten Stand-alone-CAN-Controller – i82526 von Intel und 82C200 von Philips Semiconductors – verfügbar.
Im März 1992 gründeten sechs Firmen und zwei Privatpersonen den eingetragenen Verein CAN in Automation (CiA) mit Sitz in Nürnberg – der Autor war ebenfalls dabei. Der Fokus lag auf CAN-Anwendungen abseits der Straße. Trotzdem nutzten auch viele Ingenieure und Ingenieurinnen aus der Automobilindustrie die CiA-Informationsveranstaltungen und später die CiA-Seminare.
Bereits 1991 wurde das erste CAN-Netzwerk in der S-Klasse von Mercedes-Benz eingesetzt. Es folgte BMW mit einem CAN-Netzwerk in der 7er-Serie, welches fünf Steuergeräte verband. Im Jahre 1994 veranstaltete der CiA-Verein die erste internationale CAN-Konferenz (iCC), an der auch viele Mitarbeiter und Mitarbeiterinnen aus der Automobilindustrie teilnahmen. In den folgenden Jahren rüsteten alle Pkw- und Lkw-Hersteller ihre Fahrzeuge mit eingebetteten CAN-Netzwerken aus.
Während die Pkw-Industrie keine höheren CAN-Protokolle für die fahrzeuginterne Vernetzung standardisierte, entwickelte die nordamerikanische Lkw-Industrie das auf CAN basierende J1939-Kommunikationssystem, das 1994 in den Markt eingeführt wurde. Zur gleichen Zeit übernahm der CiA die in einem europäischen Forschungsprojekt entwickelte CANopen-Anwendungsschicht. In der Automobilindustrie spielte CANopen als offenes Kommunikationssystem anfänglich keine Rolle.
Patchwork-Netzwerke
In den 90er-Jahren wurden in Straßenfahrzeugen zunehmend Steuergeräte an CAN-Netzwerke angeschlossen. Zuerst nur im Antriebstrang, dann auch in Komfortbereich zur Steuerung von Fensterhebern, Außenspiegeln, Klimaanlagen und Scheinwerfern. Die Funktionen wurden auf mehrere CAN-Netzwerke aufgeteilt, die oft mit unterschiedlichen Bitraten (500 kbit/s, 250 kbit/s oder 125 kbit/s) betrieben wurden. Sie waren über Bridges, Router oder Gateways miteinander verbunden. Es handelte sich um sogenannte Patchwork-Architekturen, die von Modell zu Modell erweitert wurden.
In Nutzfahrzeugen kamen im Antriebsstrang zunehmend J1939-Netzwerke zum Einsatz. Auch für die Kommunikation zwischen ziehenden Fahrzeugen und gezogenen Fahrzeugen wurde CAN verwendet. Der europäische Gesetzgeber forderte, dass sich jeder Anhänger oder Auflieger an ein entsprechendes Zugfahrzeug koppeln lassen muss. Dies resultierte in einer internationalen Norm (ISO 11992), die auf den SAE-J1939-Spezifikationen basiert. Allerdings gibt es eine eigene Transceiver-Norm (ISO 11992-1). Derzeit wird die Normenreihe ISO 11992 in einem vom Autor geleiteten Arbeitskreis überarbeitet. Im selben Arbeitskreis wurde die Überarbeitung der teilweise ebenfalls auf J1939 basierenden Tachograph-Norm (ISO 16844) weitgehend abgeschlossen.
Der CiA entwickelte kurz vor der Jahrtausendwende eine CANopen-Gateway-Spezifikation für Fahrzeugaufbauten (CiA 413). Iveco nutzt sie beispielsweise für seine Transporter und Lastkraftwagen. Inzwischen gibt es auch Profilspezifikationen für Lkw-Aufbauten. Dazu zählen das Profil für Abfallsammelfahrzeuge (CiA 422/EN 16815) sowie das Profil für Feuerwehrfahrzeuge (DIN 14700). Für Zusatzgeräte in Taxen, Polizeiwagen und Pkw für Fahrer und Fahrerinnen mit körperlichen Einschränkungen wurde das CANopen-Profil CiA 447 entwickelt. Es spezifiziert unter anderem die CANopen-Schnittstellen für Dachbalken von Einsatzfahrzeugen und von Ansteuerungen von digitalen Funkgeräten sowie von Taxametern.
Die zweite CAN-Generation
Auf Initiative von General Motors und anderen Fahrzeugherstellern entwickelte Bosch die zweite CAN-Generation: CAN FD (CAN mit flexibler Datenrate). In akademischen Kreisen war bereits Anfang des 21. Jahrhunderts die Idee diskutiert worden, nach der Arbitrierungsphase – wenn nur noch ein Teilnehmer sendet – die Bitrate zu erhöhen und sie wieder abzusenken, bevor im ACK-Feld alle Teilnehmer den korrekten Empfang des Daten-Frames bestätigen. In CAN FD wird genau dies getan: Nachdem nur noch ein Knoten senden darf, werden nach der Geschwindigkeitsumschaltung die Bits schneller übertragen (übliche Bitraten sind 2 Mbit/s, 4 Mbit/s oder 5 Mbit/s). Es ist aber auch möglich, mit 250 kbit/s zu arbitrieren und mit 1 Mbit/s in der Datenphase die Bits zu übertragen.
Beim CAN-FD-Protokoll wurde das Datenfeld von maximal 8 Byte (klassisches CAN-Protokoll) auf 64 Byte erweitert. Dies verbessert die Effizienz von Transport-Protokollen, die lange Nachrichten in kleine Häppchen (Segmente) aufteilen und beim Empfänger wieder korrekt zusammenfügen. CAN FD wurde anfänglich nämlich vor allem für das schnellere Herunterladen von Software gewünscht. Das längere Datenfeld ist darüber hinaus sinnvoll, um funktional sichere oder »Secure«-Nachrichten zu übertragen, die zusätzliche Protokolldaten übertragen müssen.
Der CiA war an der Entwicklung von CAN FD von Anfang an beteiligt. Insbesondere organisierte der Verein sogenannte Plugfests in Deutschland und den USA, bei denen die ersten Implementierungen auf Interoperabilität getestet wurden. Der Autor begleitete die internationale Normung als Obmann des zuständigen ISO-Arbeitskreises (ISO TC22 SC31 WG3). Auch die Norm für Transceiver (ISO 11898-2) wurde entsprechend angepasst. Es existieren zwei Parametersätze, die missverständlich als 2-Mbit/s- bzw. 5 Mbit/s-Parameter bezeichnet wurden.
Die real erreichbaren Bitraten hängen nämlich nicht nur von Transceivern ab, sondern auch von der Topologie und den anderen elektromechanischen Komponenten (Kabel und Steckverbinder sowie Zusatzschaltungen). Der CiA hat deshalb Empfehlungen für das Einstellen der Bitraten (CiA 601-3) und eine CAN-FD-Kabel-Spezifikation (CiA 601-6) herausgegeben. Zusätzlich gibt es noch eine Spezifikation für CAN-Gleichtaktdrosseln (CiA 110), die einige Autohersteller vorschreiben.
Bitraten von 5 Mbit/s und mehr sind durchaus realistisch für Multidrop-Netzwerke. Multidrop-Netzwerke verbinden Teilnehmer ohne zusätzliche Hub- oder Switch-Komponenten. Diese erhöhen zwar die Kosten, können aber andererseits das Ausfallen reduzieren und damit die Verfügbarkeit des Gesamtsystems erhöhen. Bei Verwendung von normalen CAN-FD-Transceivern sind 5 Mbit/s oft nur in Punkt-zu-Punkt-Netzwerken erreichbar. Vor allem der geforderte Temperaturbereich begrenzt die Bitrate bei gegebener Netzwerkauslegung.
Daneben wurde die Fehlersignalisierung eingespart und in die höheren Protokollschichten verschoben. CAN FD Light ist beispielsweise als tiefeingebettetes Netzwerk in LED-Scheinwerfern geeignet oder zur internen Kommunikation in Batteriesystemen. Ein entsprechender Konformitätstestplan für CAN FD Light ist im CiA in Entwicklung. Zusätzlich plant der CAN-Verein CAN-FD-Light-Plugfests, um die Interoperabilität von Implementierungen zu testen.
CAN XL – die dritte CAN-Generation
Im Jahre 2018 initiierte Volkswagen im CiA die Entwicklung der dritten CAN-Generation. Ziel war ein CAN-Protokoll, mit dem sich TCP-Segmente in einem Telegrammrahmen (Data Frame) übertragen lassen. Mit einem Datenfeld von bis 2048 Byte kann CAN XL – wie der Zusatz Extra Large vermuten lässt – genau das. Zusätzlich sollten im CAN-Protokoll Informationen über das genutzte höhere Protokoll enthalten sein, damit auf demselben Kabel verschiedene Anwendungen parallel betrieben werden können.
Dazu bietet das CAN-XL-Protokoll die 8-Bit-Felder SDU-Type und VCID (Virtual CAN Network ID). Dies ermöglicht den Einsatz als Backbone-Netzwerke, die in modernen Zonen-Netzwerk-Architekturen Sub-Netzwerke miteinander verbinden. Diese Architekturen sind nicht mehr funktional strukturiert, sondern auf minimale Netzwerklängen optimiert. Eine Einsparung von Kabeln kann zu signifikanten Gewichtseinsparungen führen, was insbesondere für Elektrofahrzeuge von Bedeutung ist.
In CAN XL lässt sich optional die Fehlersignalisierung abschalten, um sie beispielsweise in der Transportschicht (Layer 4) zu realisieren. Eine weitere Änderung gegenüber den ersten beiden CAN-Generationen ist die funktionale Aufspaltung der Prioritätszuteilung und der Adressierung. Im klassischen CAN-Protokoll und im CAN-FD-Protokoll werden diese beiden Funktionen mithilfe des CAN-Identifiers erledigt. Es kann entweder 11 Bit oder 29 Bit lang sein. In CAN XL gibt es nun einen 11-Bit-Prioritäts-Identifier und ein 32-Bit-Akzeptanzfeld. Das Akzeptanzfeld kann eine Knotenadresse oder einen Inhaltsanzeiger enthalten. Somit lassen sich alle bisherigen CAN-Anwendungen in einem CAN-XL-Netzwerk nutzen, wenn die Busbandbreite ausreichend ist.
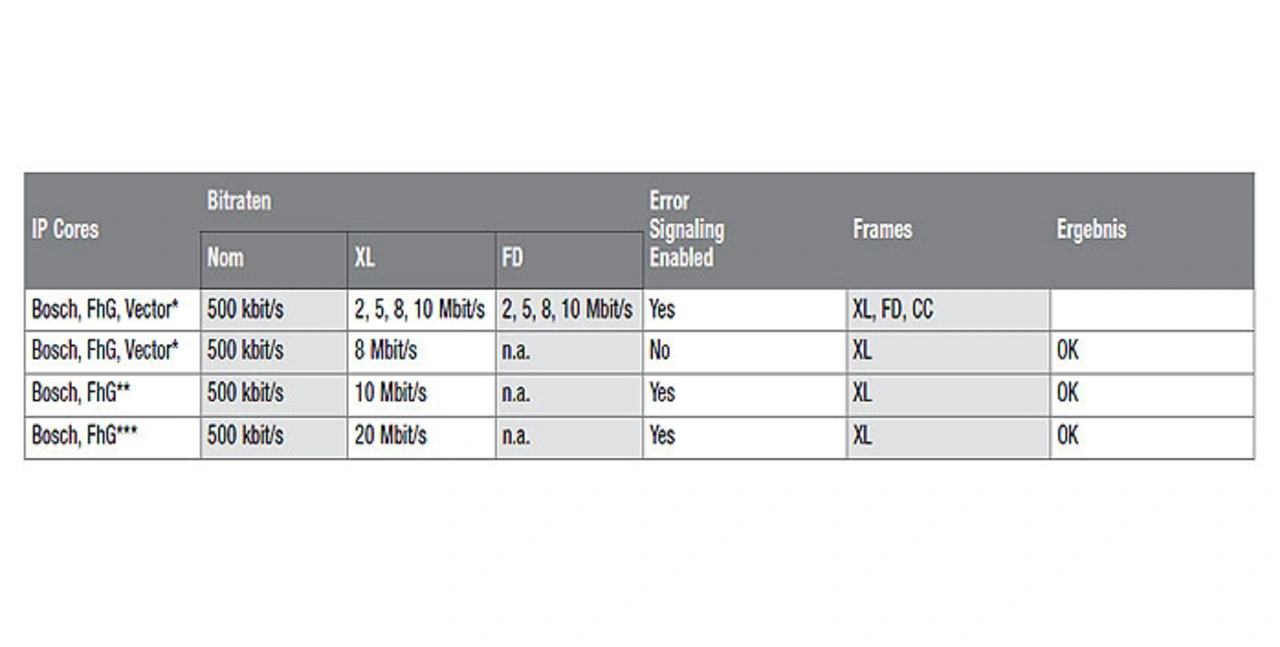
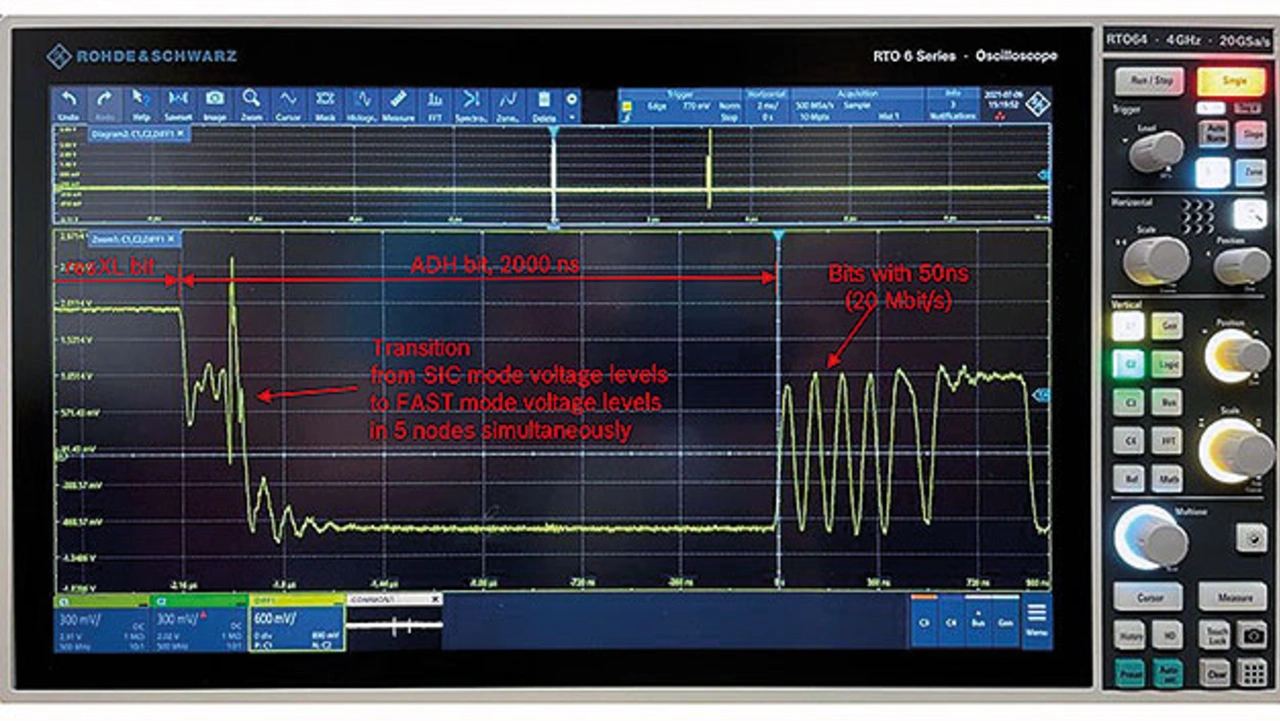
Bezüglich der physikalischen Übertragung zwischen CAN-Controller und CAN-Transceiver kann der Anwender die übliche NRZ-Kodierung (Non Return to Zero) oder die neue PWM-Codierung (Pulse-Width Modulation) verwenden. Mit der PWM-Codierung sind höhere Bitraten in der Datenphase erreichbar. Unter Laborbedingungen wurden 20 Mbit/s erzielt.
Um den Anwendern das Evaluieren bezüglich des »Ringings« auf den Netzwerkleitungen zu vereinfachen, erfolgt die Umschaltung von der langsamen Arbitrierungsphase (maximal 1 Mbit/s) zur schnellen Dataphase (10 Mbit/s und mehr) in zwei Schritten (zuerst von TxD dominant zu Level-0 und wenn das differenzielle Signal stabil ist zu Level-1). Die beiden Spannungshübe sind so geringer und führen deshalb zu weniger Überschwingern. Gleiches gilt für das Abbremsen am Ende des CAN-XL-Rahmentelegramms (zuerst von Level-1 zu aktiv rezessivem Netzwerksignal und dann zu dominantem Signal).
Außerdem spezifiziert der CiA einige Funktionen des CAN-XL-Layer-Managements sowie Zusatzfunktionen. Die SDU-Type-Codierung ist in CiA 611-1 definiert. Das Fragmentieren von CAN-XL-Datenframes wird in CiA 613-3 beschrieben. Mit dieser Funktion kann man die Netzwerk-Latenzzeit optimieren und lange Datenframes in kleineren Häppchen übertragen. Eine weitere Zusatzfunktion ist das optionale Security-Protokoll, mit dem die CAN-XL-Datensicherungsschicht gegen unberechtigte Zugriffe geschützt werden kann. Es wird in CiA 613-1 spezifiziert und kann in Hardware im Mikrocontroller implementiert werden. Führende Mikrocontroller-Hersteller beteiligen sich aktiv an dieser CiA-Spezifikation. Selbstverständlich wird der CiA auch Implementierungs- und Anwendungsempfehlungen zur Verfügung stellen (CiA 412).
Die Zukunft des CiAs
Innerhalb von 30 Jahren hat sich CAN in Automation zu einem allgemeinen CAN-Verband gemausert, der alle Anwendungsgebiete abdeckt. Dies umfasst insbesondere Straßenfahrzeuge, Off-Road-Fahrzeuge, Eisenbahnen, Schiffe, Flugzeuge sowie Drohnen und sogar Satelliten. Mit der Entwicklung von CAN XL ist der eingetragene Verein nun auf neue Anforderungen vorbereitet.
Ab 2026 werden die ersten Fahrzeuge mit CAN-XL-Netzwerken auf der Straße sein. Vielleicht nutzen andere Branchen CAN XL schon vorher. Das hängt auch davon ab, wie schnell die CiA-Mitglieder die anwendungsspezifischen Profile anpassen. Mit derzeit über 700 Mitgliedern und 14 festangestellten Mitarbeiterinnen und Mitarbeitern ist der CAN-Verein gut gerüstet, die Herausforderungen der Zukunft zu meistern.
Der Autor

Holger Zeltwanger Vorsitzender der internationalen CAN-Anwender- und -Hersteller-Vereinigung des CiA e.V..
