Ethernet und IP im Kraftfahrzeug
Entwicklungswerkzeuge für den Ethernet- und IP-Einsatz
Fortsetzung des Artikels von Teil 2
Ethernet als Systemnetzwerk für die Kamera nutzen
Ein kamerabasiertes Fahrerassistenzsystem wird bei BMW die erste Serienanwendung im Kraftfahrzeug sein, die IP und Ethernet als Systemnetzwerk im Fahrzeug einsetzt. OEMs und Zulieferer nutzen hierfür den Physical Layer BroadR-Reach, um gegenüber der bisher gängigen LVDS-Technologie Gewicht und Kosten einzusparen. BroadR-Reach wird von weiteren Anbietern lizensiert.
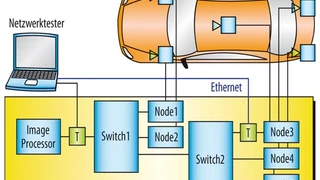
Ein Kamerasystemnetzwerk ist exemplarisch mit möglichen Messpunkten in Bild 1 dargestellt. Alternativ lassen sich alle Kameras direkt mit einem Switch verbinden. Wie bei den bisher im Kraftfahrzeug verwendeten Bussystemen muss der Datenverkehr an verschiedenen Punkten im Netzwerk beobachtet, analysiert und zeitsynchron verglichen werden. Die Mess-Hardware muss daher zunächst die aktuelle Busphysik unterstützen, beispielsweise BroadR-Reach, aber auch für zukünftige Physical Layer offen sein. Wünschenswert ist ein mehrkanaliger Abgriff über T-Stücke, der das Systemnetzwerk beim Monitoring möglichst wenig beeinflusst. Zur Validierung der Systemfunktion sollte das T-Stück auch Fehler einfügen können. Über die Analyse hinausgehend ist auch die Stimulation oder gar die Simulation ganzer Teile des Netzwerks erforderlich (Restbussimulation). Das bringt einige Herausforderungen an die Mess-Hardware mit sich.
Eine Kameraapplikation stellt hohe Anforderungen an Zeitsynchronisation und Quality of Service (QoS). Diese sollen durch Protokollerweiterungen des Audio-Video-Bridging-Standards (AVB) gelöst werden. Nachdem sich die Hersteller hinsichtlich der Bit-Übertragungsschicht (OSI-Layer 1) praktisch einig sind, wird aus Kosten- und Testgründen auch eine Vereinheitlichung der höheren Schichten angestrebt.
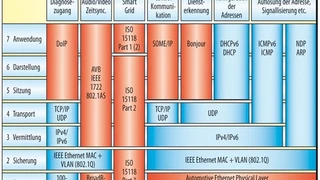
Allein aufgrund der bei der Kameraapplikation verwendeten Protokolle gibt es neue Anforderungen an die Mess-Software, damit beliebige Signale aus der Payload der verschiedenen und durchaus komplexen Protokolle applikationsgerecht präsentiert und manipuliert werden können. Bild 2 zeigt die für AVB zum Einsatz kommenden Protokolle in den Spalten Audio/Video und Control-Kommunikation. Hinzu kommen Protokolle zur Bandbreitenreservierung und weitere Netzwerk-Management-Protokolle, siehe auch die vier rechten Spalten in Bild 2. Diese und weitere in der Grafik aufgeführte Protokolle kommen aufgrund der im Folgenden betrachteten Anwendungsfälle hinzu.
Diagnosezugang im Blickpunkt
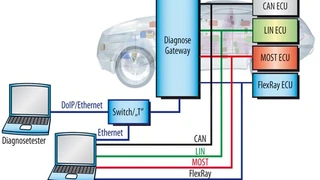
Über die Technologie Diagnostics over IP (DoIP) ist es möglich, alle angeschlossenen Steuergeräte verschiedener Bussysteme zentral über einen leistungsfähigen Ethernet-Zugang zu flashen (Bild 3). Die Systementwicklung des OEM muss diesen Dienst valide absichern. Weil ein Steuergerät als Gateway eingesetzt wird, besteht großes Interesse, die Übertragung der Diagnosedaten nicht nur auf Seite der angeschlossenen Bussysteme zu analysieren, sondern auch auf IP-Seite. Relevant sind die Protokolle ISO 13400 und IPv4, gegebenenfalls auch IPv6.
Intelligentes Laden
Das intelligente Laden, auch Smart-Charging genannt, geht weit über das einfache Anstecken an die Haushaltssteckdose hinaus. Das zu ladende Elektrofahrzeug ist über eine Ladestation an das Stromnetz (Grid) angeschlossen. Ladevorgänge starten nicht einfach, sondern melden den Bedarf erst einmal an. Durch die Verzögerung einzelner Ladevorgänge um Bruchteile von Minuten lassen sich Überlastungen des Grids vermeiden. Weiter lassen sich angeschlossene Fahrzeuge als Speicher nutzen; die Abrechnung mit dem Stromversorger kann automatisiert erfolgen.
Das ermöglicht die Kommunikation zwischen Fahrzeug und Ladestation über Ethernet auf IP-basierten Protokollen, deren Standardisierung in der Norm ISO 15118 festgelegt ist. Die Ladestation kommuniziert dabei mit dem Grid und dem Fahrzeug. Für den Systemverantwortlichen beim Fahrzeughersteller ist die Kommunikation des Pkw mit der Ladestation wichtig. Um den Ladeprozess sicherzustellen, ist eine detaillierte Analyse und Validierung der Protokolle unumgänglich. Das Entwicklungswerkzeug muss auch diese Protokolle unterstützen (Spalte Smart Grid in Bild 2).
Kalibrieren, Debuggen und Flashen
Ethernet mit dem Mess- und Kalibrierprotokoll XCP wird in der Entwicklung für das Kalibrieren, Debuggen und Flashen der Steuergeräte schon mehrere Jahre genutzt. In der Serie steht aus Kostengründen der Ethernet-Zugang gar nicht mehr zur Verfügung. Deshalb wird derzeit über das vorliegende Arbeitsprotokoll, beispielsweise CCP oder XCP on CAN, kalibriert und reprogrammiert. Wenn aber in naher Zukunft Ethernet ins Fahrzeug einzieht, wäre das Messen und Kalibrieren über XCP on Ethernet aufgrund der deutlich höheren Messdatenrate auch in der Serie attraktiv.
Entwicklungswerkzeuge für den Ethernet- und IP-Einsatz
- Entwicklungswerkzeuge für den Ethernet- und IP-Einsatz
- Anforderungen an ein IP-Entwicklungswerkzeug
- Ethernet als Systemnetzwerk für die Kamera nutzen
- WLAN und Car-2-X
- Absicherung von IP-Serienprojekten
- Ausblick auf IP-Entwicklungswerkzeuge
Lesen Sie mehr zum Thema
Das könnte Sie auch interessieren
Entwicklung + Test
Prüfstand für den komplexen Steuergeräteverbund
Vector Informatik
AUTOSAR-Erweiterungen für E/E-Entwicklungsplattform
Vector Informatik GmbH
AUTOSAR-Basis-Software unterstützt jetzt Release 4.0.3
Mit MOST-Ethernet-Kanal IP-Verkehr einfach und…
IP-Architektur eines MOST150-basierenden Infotainment-Systems
Provertha Connectors, Cables & Solutions GmbH
Crimp-Kabelstecker für Bahn- und Transportanwendungen
Ethernet im Auto
Vector tritt OPEN Allicance SIG bei
Trends und Herausforderungen bei der Entwicklung…
Quo vadis Echtzeitsysteme?
Peak-System GmbH
Hardware-Schnittstelle verbindet PCIe mit bis zu vier CAN-Kanälen
Jedes Watt zählt
Intelligentes Energie- und Leistungs-Management für die Autos von morgen
Vector Informatik GmbH
Zusätzlicher Geschäftsführer bei Vector
Elektronikplattformen mit Ethernet optimieren
Ethernet macht mobil
Conformance-Tests
Vector und FKFS kooperieren beim E-Fahrzeugladen
Zeitsynchrone Aufzeichnung von CAN, LIN, FlexRay…
Fehlersuche in komplexen vernetzten Systemen
Hybrid- und Elektromobilität
Anforderungen ans Batteriemanagement
Simulationen ersetzen unflexible und zeitintensive…
Neue Wege beim Testen
