Automatisieren von Montageprozessen
Softwaretools für die Montageplanung mit Robotern
Das Fraunhofer IPA hat mehrere Tools für eine systematische Planung und vereinfachte Montageautomatisierung entwickelt. Damit können Roboter parametriert statt programmiert werden – um sie mit wenig Aufwand erfolgreich in einer variantenreichen Produktion einzusetzen.
Die Montage ist noch immer der Produktionsschritt, in dem vergleichsweise wenig Roboter im Einsatz sind. Nur deutlich unter 20 Prozent der im Jahr 2020 verkauften Industrieroboter werden für Fügeprozesse genutzt. Zwar möchten viele Unternehmen hier gerne mehr auf Robotik setzen. Sie stehen aber oft vor Hürden, die die Automatisierung erschweren.
Genau hier setzt das Fraunhofer IPA an, indem es Software-Tools entwickelt hat, mit denen diese Hürden gesenkt oder gleich ganz beseitigt werden.
Tool prüft Automatisierbarkeit bereits im Entwicklungsprozess
Oft lässt sich schon im Planungsprozess eines Bauteils die entscheidende Weiche dafür stellen, dass das Bauteil später automatisiert gefertigt werden kann. Ob es hierfür passend geplant ist, können Unternehmen mit der Software NeuroCAD prüfen lassen. »Unsere Software analysiert mithilfe maschineller Lernverfahren Bauteileigenschaften und ermittelt daraus eine Einschätzung, inwieweit sich ein Bauteil für eine Montageautomatisierung eignet«, erklärt Entwickler und Projektleiter Raoul Schönhof vom Fraunhofer IPA.
Unternehmen können auf https://neurocad-dev.web.app/dashboard ihre STEP-Dateien (ein Standard für den Austausch von 3D-Produktdaten) kostenlos hochladen und erfahren innerhalb weniger Sekunden, wie einfach oder schwierig ein Bauteil zu vereinzeln ist. Außerdem bewertet das Tool die Greifflächen und die Ausrichtbarkeit des Bauteils. Zusätzlich nennt das neuronale Netzwerk eine Wahrscheinlichkeit dafür, dass es mit seinem Ergebnis richtigliegt. NeuroCAD hilft, unvorteilhafte Bauteilkonstruktionen noch im Planungsprozess zu vermeiden und Montageprozesse zu beschleunigen.
Montageautomatisierung systematisch und automatisiert planen
Neben dem Bauteil selbst können auch vielfältige andere Faktoren im Fügeprozess eine automatisierte Ausführung erschweren, sei es aus technischen oder wirtschaftlichen Gründen. Um diese Gründe zu ermitteln und Abhilfe zu schaffen, führt das Fraunhofer IPA bereits seit Jahren weltweit die Automatisierungs-Potenzialanalyse (APA) durch. »Dabei gehen wir durch die Produktion und analysieren diese. Eine von uns entwickelte App unterstützt dabei, die einzelnen Prozessschritte zu erfassen, wertet die Eingaben aus und informiert über Automatisierungspotenziale«, erklärt Joshua Beck, der als wissenschaftlicher Mitarbeiter am Fraunhofer IPA arbeitet und die App mitentwickelt hat. Indem die App technische und wirtschaftliche Aspekte berücksichtigt, bietet sie eine umfangreiche Datenbasis für Investitionsentscheidungen. Neben der Montage kann sie auch Prozesse wie die Demontage oder das Maschinenbestücken analysieren.
Auch beim Planen und Durchführen einer Montage kann Automatisierung eine Anwendung optimieren. Wie das möglich wird, zeigt die neue, drei Komponenten umfassende Software Assemblio Assembly Suite (Bild 1).
- Die Software nutzt eine Künstliche Intelligenz (KI), die STEP-Dateien analysiert und auswertet. Jedes CAD-System kann diese informationsreichen Dateien generieren. Sie liefern der Komponente »3D-Analyse-KI« alle notwendigen Informationen, um strukturierte Montageinformationen präzise abzuleiten.
- Die zweite Komponente von Assemblio ist der »Assembly Composer«, der die extrahierten Montageinformationen aus der STEP-Datei ausliest und in ein grafisches Tool für die Montageplanung einspeist. Dieses Grafik-Tool zeigt montagerelevante Informationen vereinfacht an, sodass sich die Montage spielend einfach und fehlerfrei planen lässt.
- Die KI-Montageassistenz »KIM« komplettiert das Trio an Komponenten. Sie erstellt automatisch und kostengünstig Montageassistenzen zur interaktiven Unterstützung des Personals. Die Assistenz ist variabel und kann 2D- oder 3D-basiert sein oder auf Augmented Reality basieren.
Erste Nutzerstudien zeigen eine Zeitersparnis von bis zu 92 Prozent, wenn Assemblio zum Einsatz kommt. Die IPA-Ausgründung »Assemblio« führt die Technik aktuell zur Marktreife.
Variantenvielfalt mit Roboter beherrschen
Eine häufige Hürde für die Montageautomatisierung ist die zunehmende Variantenvielfalt, die bisher mit hohen Programmieraufwänden einhergeht. Diese Aufwände machen den Einsatz von Robotik schnell unwirtschaftlich. Genau hier setzt die Software pitasc an: Mithilfe direkt einsetzbarer Bausteine oder »Skills« lassen sich Roboterprogramme einfach zusammenstellen. »Bisher war es erforderlich, ein Robotersystem für jede Anwendung weitgehend neu zu programmieren. Mit unserer Software sind einmal modellierte Aufgaben schnell auf neue Produktvarianten, Produkte und sogar auf Roboter anderer Hersteller übertragbar, indem lediglich die Parameter angepasst werden«, sagt Frank Nägele, Leiter der Gruppe Roboterprogrammierung und -regelung am Fraunhofer IPA.
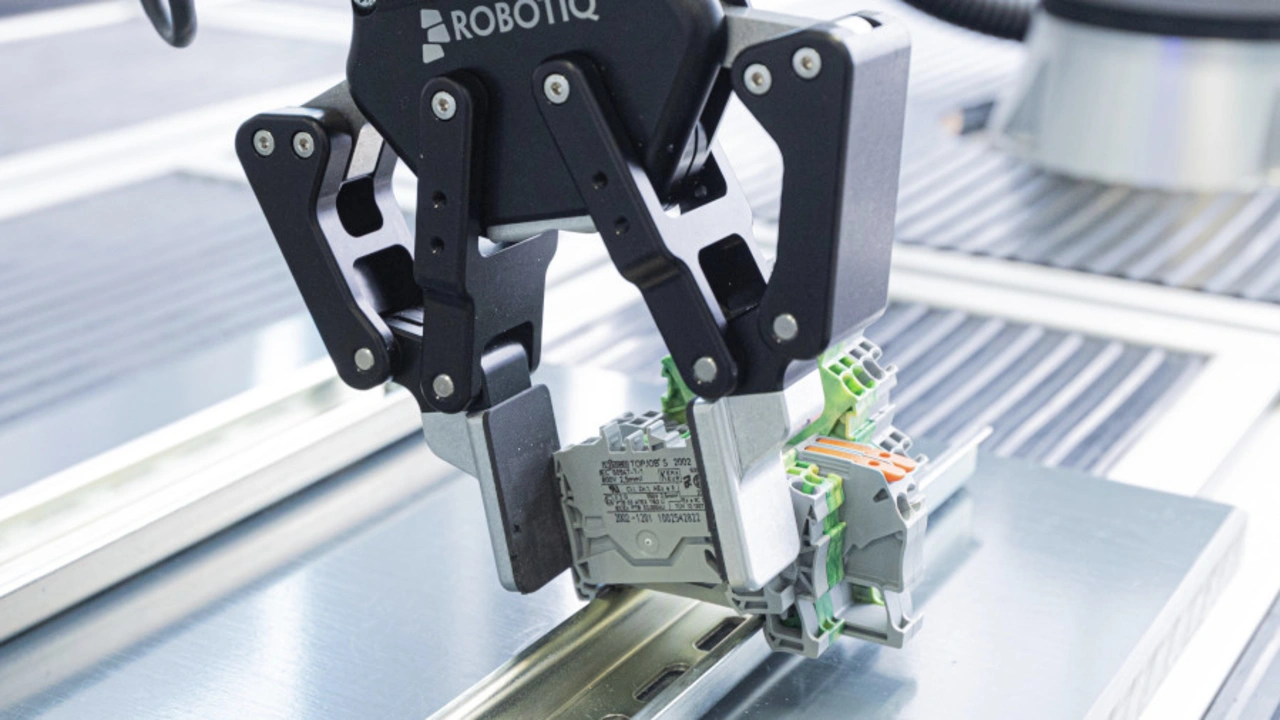
Am Messestand des Fraunhofer IPA auf der Motek zeigte das Institut einen Demonstrator mit einem Roboter, der fünf Varianten von Reihenklemmen auf eine Hutschiene steckt (Bild 2). Wird eine Variante gewechselt, müssen lediglich fünf Parameter angepasst werden – eine Sache von unter fünf Minuten. Gemeinsam mit der Firma Wago hat das Fraunhofer IPA diesen Anwendungsfall bereits erfolgreich in einem Testszenario umgesetzt.
Eine zweite Aufgabe dieses Roboters zeigte, was sich forschungsseitig tut, um die Montageautomatisierung voranzubringen. So setzt das Verbundforschungsprojekt »rob-aKademI« auf selbstlernende Roboter. Das Projekt hat das Ziel, die flexible Roboterprogrammierung für Montageaufgaben mit wenig Aufwand zu ermöglichen. Es adressiert vornehmlich Unternehmen, die einen einfachen, aber zukunftsfähigen Einstieg in die roboterbasierte Montageautomatisierung suchen. Hierfür ist eine Simulationsumgebung entstanden, in welcher der Roboter auf Basis von CAD-Daten und mithilfe der KI-Methode des »Reinforcement Learning«, also dem Prinzip aus Versuch und Irrtum, das Montieren lernt. Er lernt dabei auch, mit Toleranzen des Werkstücks oder Ungenauigkeiten im Prozess umzugehen. So soll eine roboterbasierte robuste Montage bis hin zu Losgröße 1 möglich werden.
