Virtualisierung
Vision einer intelligenten Vernetzung
Fortsetzung des Artikels von Teil 6
Fahrerassistenzfunktionen integrieren
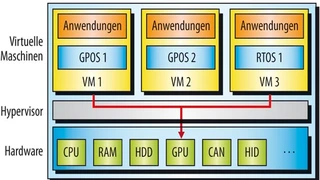
Im Fahrzeug kommt mittlerweile die gleiche leistungsfähige Hardware zum Einsatz wie in portablen Computern – sowohl auf CPU- als auch auf GPU-Ebene. Zudem kann die Head-Unit auch direkt auf die Bilddaten von Front-, Seiten-, Heck- und Nachtsichtkamera zugreifen. Damit wären prinzipiell auf die Head-Unit zugeschnittene kamerabasierte Fahrerassistenzfunktionen realisierbar, die die vorhandene Hardware sinnvoll nutzen und zusätzliche Hardware-Dopplung vermeiden könnten.
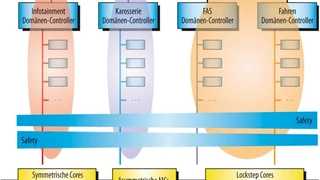
Die technischen Anforderungen entsprechen in etwa denen einer grafischen Bedienoberfläche, allerdings mit deutlich höherem Safety-Aufwand. Insbesondere auf der Ebene der Virtualisierung müssen aufgrund der notwendigen Echtzeiteigenschaften zahlreiche Hardware-nahe Aspekte betrachtet werden, die negativen Einfluss auf Determinismus und Zertifizierung haben könnten. Als Stichworte lassen sich hier Cache-Kohärenz, Interrupt-Last, Bus-Kollisionen oder Pre-emption nennen. Spätestens an dieser Stelle wird deutlich, dass Echtzeitapplikationen im Industrieumfeld nicht nur eine Abschottung auf Software-, sondern auch auf Hardware-Ebene nötig machen, gegebenenfalls durch die Zuweisung eines eigenen CPU-Kerns. Insofern ist die Nutzung von Multi-Core-Prozessoren nicht nur aus Leistungs- oder Energiesicht notwendig, sondern auch aus Gründen der funktionalen Sicherheit.
Virtualisierung als Fundament einer agilen, leistungs-starken Informations- und Kommunikationsplattform
- Vision einer intelligenten Vernetzung
- Virtualisierung im Fokus
- Kernkomponente I&K-Domänen-Controller
- Ausprägung der Head-Unit mit Virtualisierung
- Anwendungsfälle aus I&K
- Benutzerschnittstelle vereinheitlichen
- Fahrerassistenzfunktionen integrieren
- Energie-Management optimieren
- Virtualisierung als Enabler
Lesen Sie mehr zum Thema
Das könnte Sie auch interessieren
Sicherheit
Fehlererkennung und -behebung in Multifunktions-Steuergeräten
Fahrerassistenz
ADAC-Test: BMW assistiert am besten
RM Michaelides
Telematik-Lösung erleichtert Fahrzeug-Management und -Diagnose
Comp-Mall GmbH
Fahrzeug-PC unterstützt eine Vielzahl von I/O-Schnittstellen
Pretended Networking als Alternative zum…
Funktionen statt Steuergeräte abschalten
Infotainment
Personalisierte Radio-App für BMW-und Mini-Fahrer
Jedes Watt zählt
Intelligentes Energie- und Leistungs-Management für die Autos von morgen
Lichttechnik
Hella: Flächenleiter für BMW-X6-Facelift
BMW ConnectedDrive 2012
Fortschritte bei der Fahrzeugvernetzung
Sprachbedienung
Nuance „Dragon Drive! Messaging“ in neuen BMW-Modellen
Technologie-Kooperation
BMW und Toyota arbeiten gemeinsam an nachhaltiger Mobilität
Dynamische Frontscheinwerfersystem
3er BMW 2012 mit SmartBeam DFL
Kooperative Sensorik zur Steigerung von…
Kooperative Sicherheit
Spritverbrauch senken, Reichweite erhöhen
System-Basis-Chip für den Teilnetzbetrieb am CAN-Bus
Die Sicherheit im Online-Flashen
Reduzierung von Reaktionszeiten bei Software-Fehlern
Der BMW Nothalteassistent
Hochautomatisiertes Fahren für mehr Sicherheit
