Die Vorteile von SPE in der Robotik
Single-Pair Ethernet gibt humanoiden Robotern Schwung
Immer mehr Freiheitsgrade und KI-gestützte zentrale Recheneinheiten schaffen die Voraussetzungen für immer komplexere und präzisere humanoide Roboter. Single-Pair Ethernet tut ein Übriges: Es verringert Gewicht und Installationsaufwand der Verkabelung. Die dafür nötigen PHY-Bausteine sind vorhanden.
Humanoide Roboter können mittlerweile ihr Umfeld binnen Millisekunden erfassen, sich daran anpassen und entsprechend reagieren. Voraussetzung für das Design derart anspruchsvoller humanoider Roboter ist ein Kommunikationssystem, das breitbandige Echtzeit-Datentransfers über mehrere Gelenksteuerungen hinweg unterstützt und sich dabei in einen platz- und gewichtssparenden Rahmen einfügt, der auch in industriellen Umgebungen mit hohem Störaufkommen zuverlässig und robust bleibt. Die Single-Pair-Ethernet-PHYs von Texas Instruments (TI) tragen diesen Anforderungen Rechnung und vereinfachen die Systemarchitektur für die nahtlosen Bewegungsabläufe humanoider Roboter.
Einfachere Systemarchitekturen und weniger Gewicht dank SPE
Um hohe Aktualisierungsraten und eine hohe Bandbreite von bis zu 1 Gbit/s für die Gelenksteuerung zu erzielen, bedarf es einer hochentwickelten, echtzeitfähigen Architektur für das Steuerungssystem. Systeme auf Ethernet-Basis vereinfachen die Architektur, indem sie einen einheitlichen, breitbandigen Kommunikationsstandard bereitstellen, der den Datenaustausch zwischen den verschiedenen Systemkomponenten erleichtert. Die SPE-Technik (xBASE-T1) kann außerdem die Gesamtabmessungen der Verkabelung verringern, was eine große Bedeutung für die Gewichtsreduzierung des Roboters hat.
Verbesserungen für die Robotertechnik durch SPE-PHYs
Das von TI angebotene Portfolio an SPE-PHYs ist so konzipiert, dass es in puncto Footprint kompatibel zu den 100BASE-T1- und 1000BASE-T1-PHYs des Unternehmens ist. Das Single-Board-Design ermöglicht somit ein Upgrade der Feature-Ausstattung oder der Bandbreite in zukünftigen Entwicklungen, ohne dass die Hardware geändert werden muss. Dieses Konzept trägt dazu bei, die Entwicklungszyklen und die Markteinführungszeit zu verkürzen und dadurch F&E-Kosten einzusparen. Abgesehen davon enthalten die SPE-PHYs von TI eine ganze Palette von Features, die die Komplexität humanoider Roboterdesigns verringern und die Leistungsfähigkeit der Systeme verbessern.
Präzise Zeitsynchronisation
Eine präzise Zeitsynchronisation kann einem dezentralisierten humanoiden Robotersystem zugutekommen, weil sie die Voraussetzungen für eine nahtlose, deterministische Koordination der verschiedenen Gelenke schafft. Die SPE-PHYs von TI, nämlich der 1000BASE-T1-Baustein DP83TG721S-Q1 und die 100BASE-T1-Version DP83TC817S-Q1, bieten integrierte Unterstützung für IEEE 802.1AS, was eine präzise, das gesamte Netzwerk mit sämtlichen Controllern und I/O-Knoten erfassende Zeitsynchronisation mit einer einzigen Zeitreferenz ermöglicht. Entwickler können dadurch das Timestamping vom Prozessor auf den PHY auslagern und damit eine Synchronisationsgenauigkeit von 1 bis 15 ns erzielen.
Nutzung des Timestampings in SPE-PHYs: Ethernet-PHYs mit integriertem IEEE 802.1AS können die Echtzeit-Entscheidungsfindung und die Anpassungsfähigkeit humanoider Subsysteme verbessern. Unter Timestamping versteht man das Markieren ankommender und abgehender Daten mit präzisen Zeitinformationen, sobald Daten oder Ereignisse generiert oder empfangen werden. Das Timestamping lässt sich an verschiedenen Punkten des Datenpfads implementieren, nämlich in der Hardware des Ethernet-PHY, in der Hardware des MAC-IP im Prozessor oder in der Prozessor-Software. Die Prozessoren und das Ethernet-PHY-Portfolio von TI unterstützen alle drei genannten Arten des Timestampings. Abhängig von der Nähe des Timestampings zum Kabel können die Genauigkeit und der Jitter der Zeitdaten zwischen Milli- und Nanosekunden variieren. Erfolgt das Timestamping im Ethernet-PHY, also der Komponente, die den geringsten Abstand zum Kabel hat, verbessert sich die Genauigkeit der Synchronisation durch den Wegfall der nicht-deterministischen Latenzen, zu denen es kommt, wenn die Daten den PHY durchlaufen.
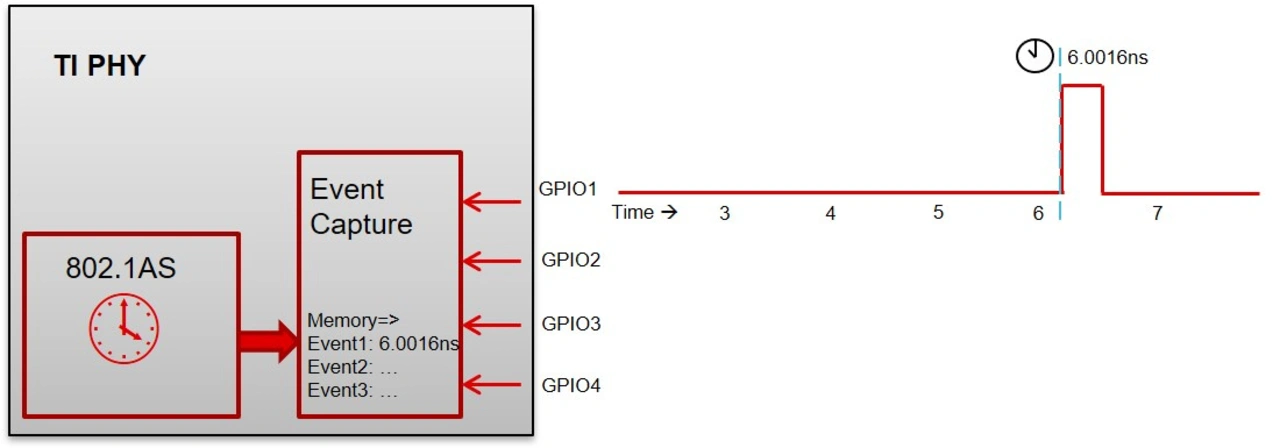
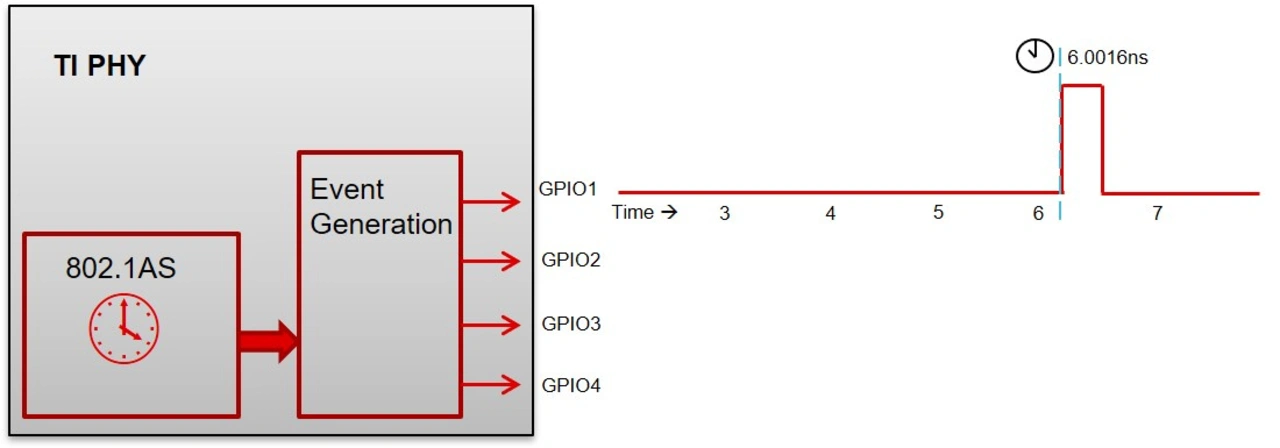
Erfassen und Generieren von GPIO-Ereignissen: Präzise Timing-Fähigkeiten für GPIO-Ereignisse verbessern die Synchronisation mehrerer Motorcontroller und sind vorteilhaft für Aufgaben, die eine präzise Detektierungs- und Reaktions-Koordination über mehrere Subsysteme hinweg erfordern. Sowohl der DP83TG721S-Q1 als auch der DP83TC817S-Q1 können Timestamps und Event-Trigger in der PHY-Hardware anstatt im Controller erzeugen. Mit seinem integrierten IEEE 802.1AS speichert der Ethernet-PHY die Uhrzeit nicht nur, sondern er kann sie auch zum Erfassen (Bild 1) oder zum Generieren (Bild 2) von Ereignissen an seinen GPIO-Pins mit Nanosekunden-Genauigkeit nutzen. Die generierten Ereignisse können die Form eines Musters haben, wie etwa bei einer 25-MHz-Taktimplementierung, oder als Impulse zu bestimmten Zeiten realisiert werden.
Betriebssicherheit und Zuverlässigkeit
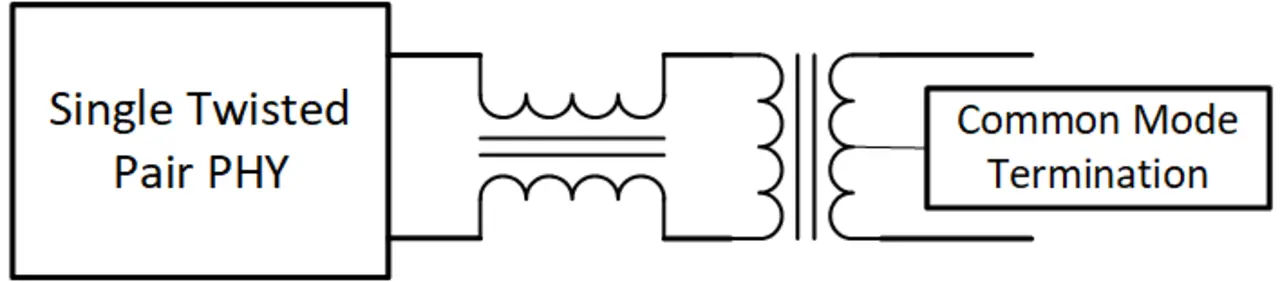
Bewältigung der EMI- und EMV-Herausforderungen: Ein humanoider Roboter ist ein auf engem Raum konzentriertes System bestehend aus zahlreichen elektronischen Baugruppen, Motoren, Aktoren und Leistungselektronik, die allesamt Störgrößen erzeugen können. Der elektromagnetischen Verträglichkeit (EMV) kommt deshalb eine entscheidende Bedeutung zu, denn elektromagnetische Interferenzen (EMI) können die Messwerte der Sensoren ebenso verfälschen wie die Steuerungssignale des Roboters. Die 100BASE-T1- und 1000BASE-T1-Ethernet-PHYs von TI wurden nach den EMI/EMV-Standards der Open Alliance entwickelt und bringen die auf dem Automotive-Markt bewährte Robustheit mit, auf die es inzwischen auch in der Robotertechnik ankommt. Eine durch galvanische Isolation erzielte, störbeständige Architektur wie in Bild 3 ermöglicht es den Bauelementen von TI, die EMI/EMV-Standards von IEC und CISPR zu erfüllen. Weitere Einzelheiten zu diesem Thema enthält die Applikationsschrift EMC/EMI Compliant Design for Single Pair Ethernet.
Kabeldiagnose: Die Beseitigung von Netzwerkproblemen kann eine große Herausforderung darstellen, wenn es um ein geschlossenes Robotersystem geht, dessen interne Bauteile nur eingeschränkt zugänglich sind. In SPE-basierten Netzwerken lassen sich die Ausfallzeiten, die durch das Diagnostizieren und Beseitigen von Netzwerkproblemen und Kabelfehlern entstehen, minimieren, wenn die Ethernet-PHYs über eingebaute Kabeldiagnose-Funktionen verfügen. Solche Funktionen, wie etwa Signal Quality Indicator (SQI) und Time Domain Reflectometry (TDR), sind über das Serial Management Interface (SMI) zugänglich.
Die SQI-Funktion überwacht die Verbindungsqualität durch Auswertung der Signalstärke, der Störpegel und der Übertragungsfehler mit dem Ziel, eine Echtzeit-Aussage über den Verbindungsstatus zu generieren. In einem in sich geschlossenen System wie etwa einem humanoiden Roboter lassen sich per SQI Signalbeeinträchtigungen oder Instabilitäten frühzeitig erkennen, um vorbeugende Wartungsmaßnahmen durchzuführen oder herauszufinden, in welchem Teil des Netzwerks die Probleme zu lokalisieren sind. Die zu den jeweiligen Zeiten ermittelten SQI-Werte werden in einem Register abgelegt und sind durch eine einfache Berechnung mit einem Signal-Rausch-Abstand (Signal-to-Noise Ratio, SNR) korrelierbar.
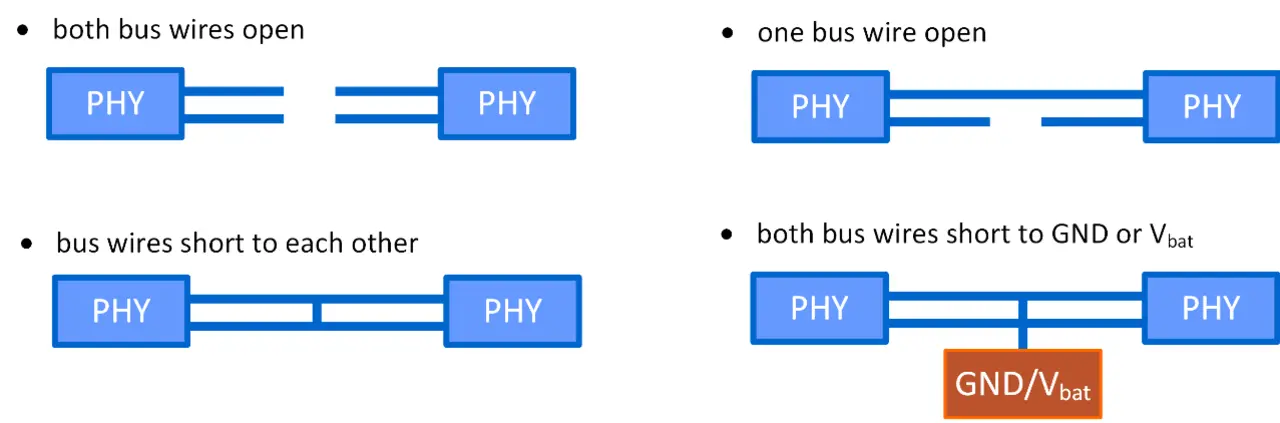
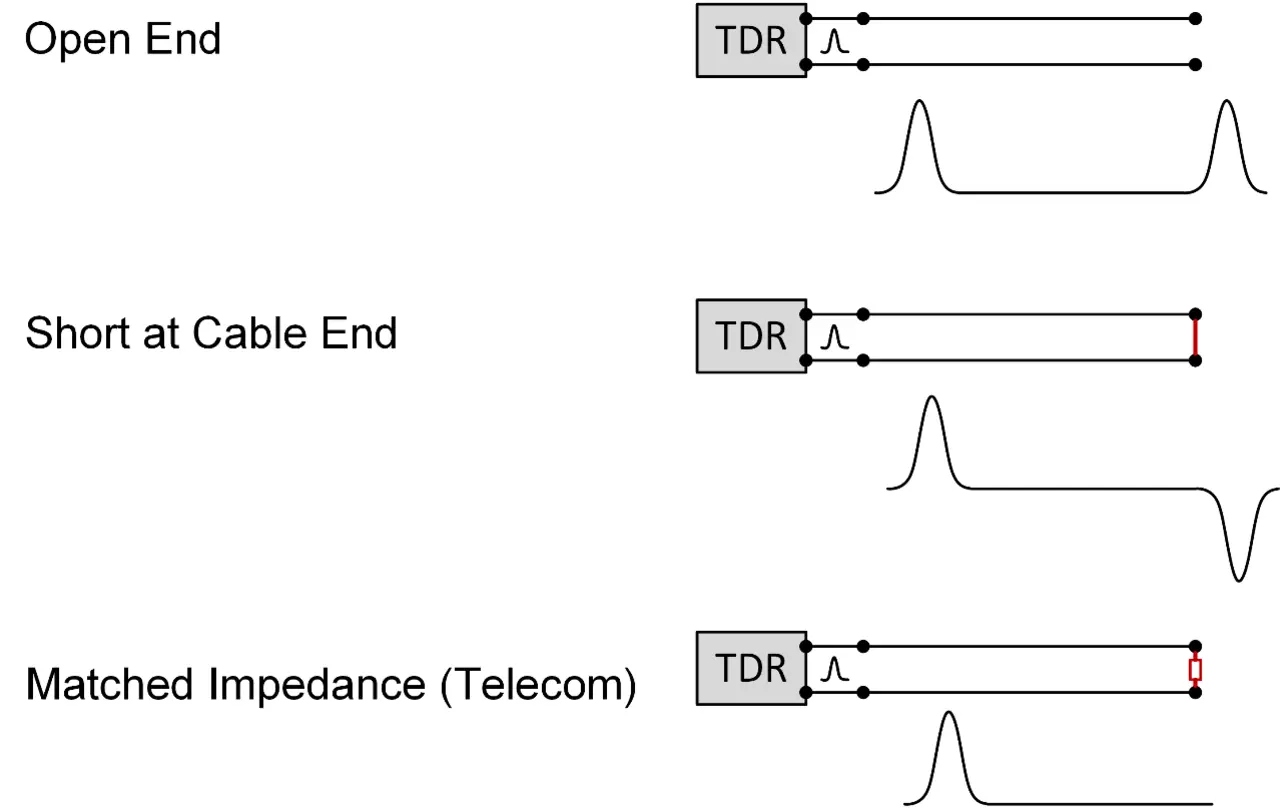
Mit der TDR-Technik lassen sich Fehler entlang des Kabels, wie etwa Kurzschlüsse oder Leitungsunterbrechungen, und ihre Distanz zum PHY feststellen. Bild 4 zeigt die verschiedenen Fehlerarten, die sich per TDR detektieren lassen. Diese Diagnosemethode kann überaus hilfreich sein, um die genaue Position eines Fehlers im Kabel einzukreisen.
Wie aus Bild 5 hervorgeht, beruht die TDR-Methode darauf, einen energiereichen Impuls in das Kabel zu schicken und das reflektierte Signal zu messen (in Phase, phasenverschoben oder ausbleibend). Der TDR-Test wird üblicherweise zur Ursachenermittlung eingesetzt, wenn keine aktive Verbindung zwischen den PHYs besteht.
In einem humanoiden Roboter können diese Fehlerisolations-Werkzeuge dazu beitragen, die allgemeine Zuverlässigkeit und Verfügbarkeit des Systems zu verbessern.
Die Systemimplementierung
Die von TI angebotenen applikationsspezifischen MCUs (ASMs), darunter die C2000-Familie und das Arm-basierte MCU-Portfolio des Unternehmens, sind kompatibel zu mehreren Echtzeit-Ethernet-Kommunikationsprotokollen, die sich auch mit Standard-Ethernet-Technologie nutzen lassen. Darüber hinaus hat TI das SORTE-Protokoll entwickelt, das Zykluszeiten von 4 µs erreicht, kompatibel zur Arm-basierten MCU-Familie ist und sich für Anwendungen eignet, die mehr Durchsatz verlangen und SPE implementieren. Weitere Einzelheiten hierzu finden Sie in diesem Referenzdesign: Simple Open Real-Time Ethernet (SORTE) Device with PRU-ICSS. Das Design von Functional-Safety-fähigen Ethernet-PHYs und die Zusammenarbeit mit externen Instanzen bei der Zertifizierung des MCU-Softwarestacks sorgen dafür, dass die Functional-Safety-Anforderungen innerhalb des Robotersystems erfüllt werden. In humanoiden Robotern wird SPE entweder in Punkt-zu-Punkt- oder in Daisy-Chain-Konfigurationen zum Anschluss von Motorcontrollern genutzt, die der Bewegungskoordination über verschiedene Subsysteme hinweg dienen.
Häufig kommt eine gatewaybasierte Abstraktion für das Management mehrerer Controller und Motorsubsysteme zum Einsatz. Mit einem Evaluierungsmodul aus einem applikationsspezifischen MCU und dem 100BASE-T1-SPE-PHY DP83TC812S-Q1 hat TI demonstriert, wie ein echtzeitbasiertes System mit mehreren Knoten einen Jitter von 60 ns erreichen kann, was ein deterministisches und vorhersagbares Systemverhalten ermöglicht. Weitere Informationen über die Testanordnung sind bei TI erhältlich.
Die Autoren:
Diana Lahl, Ethernet Product Marketing Engineer, und Dhane Jones, Robotic Systems Engineer, beide bei TI
