Wie visualisiert man Roboter-Bewegungen?
Grundlagen der Human-Robot Interaction
Selbstfahrende Roboter arbeiten zunehmend an öffentlichen Plätzen. Damit sich Passanten und Roboter nicht gegenseitig behindern, werden Konzepte erprobt, wie sich die Bewegung der Roboter über Displays visualisieren und damit für Passanten voraussehbar machen lässt. Das sind die ersten Ergebnisse.
Selbstfahrende Roboter wurden ursprünglich für die Industrie und die Logistik entwickelt. Das sind auch heute noch die größten Anwendungsfälle. Dort spielt die Mensch-Roboter-Interaktion eine untergeordnete Rolle, findet gar nicht oder höchstens mit einzelnen und trainierten Personen statt. Entsprechend sind auch die integrierten Anzeigesysteme und HMIs nicht für eine Interaktion mit Passanten in größeren Menschenmengen ausgelegt. Allmählich verlagert sich das Einsatzgebiet der Roboter aber aus den isolierten und weitestgehend menschenleeren Anwendungsbereichen und damit verändern sich auch die Anforderungen an die Anzeigesysteme. »Mittlerweile werden selbstfahrende Roboter auch in Bereichen eingesetzt, in denen sie mit einer größeren Menschenansammlung in Kontakt kommen können und sollen«, sagte Milton Guerry, Präsident der International Federation of Robotics (IFR) im August 2021.

Der Verband schätzt den Weltmarkt für Serviceroboter in der Logistik für das Jahr 2020 auf rund 120.000 ausgelieferte Geräte; 2021 sollen es bereits 160.000 sein [1]. Im Vergleich dazu sind Serviceroboter für öffentliche Bereiche wie Hotels, Flughafenterminals oder in Parkanlagen mit rund 25.000 Geräten im Jahr 2020 zwar ein noch deutlich kleinerer Markt, dafür aber stark im Kommen. Das IFR prognostiziert bis 2023 ein durchschnittliches Wachstum von knapp 40 %. Neue Anzeigekonzepte werden, zumindest zum Teil, auch für das Segment der professionellen Reinigungsroboter (Bild 1) benötigt. Der Weltmarkt lag im Jahr 2020 bei rund 18.000 Geräten und soll laut IFR ähnlich stark anziehen wie die Serviceroboter in öffentlichen Bereichen.
HRI-Anzeigen sollen Trajektorie-Konflikte lösen
Neue Anzeigesysteme für die Mensch-Roboter-Interaktion werden in der Entwicklungsdisziplin HRI, Human-Robotic Interaction, erforscht. Ein zentrales Problem der HRI-Entwicklung sind Trajektorie-Konflikte. Sie entstehen dann, wenn die intendierte Fahrspur eines Roboters für den Menschen nicht einsichtig genug ist und führen vor allem an öffentlichen Plätzen mit hohem Durchgangsverkehr zu Störungen. Anders als beim Gang durch eine Menschenmenge, bei der sich das Gehverhalten der Mitmenschen, vor allem die Intention zum Abbiegen und Ausweichen, intuitiv einschätzt lässt, fehlt diese Intuition beim Umgang mit Robotern. Diesen Mangel sollen HRI-Anzeigen ausgleichen.
Anforderungskatalog für HRI-Anzeigen
Die Entwicklung von HRI-Anzeigesystemen steht noch relativ am Anfang. Für die Human Robotic Interaction sind bisher ledglich blaue Spotleuchten etabliert, die in Fahrtrichtung des Roboters scheinen (Bild 2).

Der Ansatz ist zwar einfach umzusetzen, aber für Passanten nicht intuitiv verständlich. »Es hat auch erste Versuche mit Displays in Forschung und Industrie gegeben«, erklärt der Leiter des Displaylabors der Hochschule Pforzheim, Prof. Dr. Karlheinz Blankenbach. »Die Ergebnisse waren bisher aber nicht zufriedenstellend.« Insgesamt ist die Mensch-Roboter-Interaktion bei Servicerobotern an öffentlichen Plätzen ein noch wenig erforschtes Gebiet, in dem vor allem Praxiserfahrungen fehlen. Zu den grundlegenden Fragestellungen gehören: Welche Darstellung der Roboterfahrbahn wird quer durch alle Alters- und Kulturgruppen intuitiv verstanden? Welche Helligkeits- und Kontrastwerte sowie Farbwiedergabe muss das Anzeigesystem liefern? Welche Displays können diese Werte erreichen und sind zudem für die Integration in Serviceroboter geeignet?
Diese Aspekte haben Etienne Charrier und Prof. Blankenbach von der Hochschule Pforzheim, Franziska Babel von der Universität Ulm und Siegfried Hochdorfer vom Ulmer Roboterhersteller Adlatus Robotics untersucht und ihre Ergebnisse in einem Paper auf der SID Display Week 2021 vorgestellt [2]. Sie bieten eine erste Arbeitsgrundlage für HRI-Systementwickler.
Probandenstudie deckt Hürden auf
Anhand einer Probandenstudie mit einem Reinigungsroboter an einem Bahnhof mit mittlerem Passantenaufkommen in Deutschland wurde bestätigt, dass die fehlende Anzeige der Robotertrajektorie zu Behinderungen an öffentlichen Plätzen führt und eine Akzeptanzhürde darstellt.
Eine weitere Herausforderung für Passanten ist die fehlende Rückmeldung des Roboters, ob er Personen im Weg erkennt und einen Ausweichkurs einschlägt bzw. stoppen wird. Als beste Lösung für die Fahrbahnvisualisierung hat sich laut den Forschern eine animierte Anzeige von Pfeilen herausgestellt – entweder über eine Länge von rund 50 cm in Fahrtrichtung auf den Boden projiziert oder in Form von Richtungspfeilen auf einem Display.

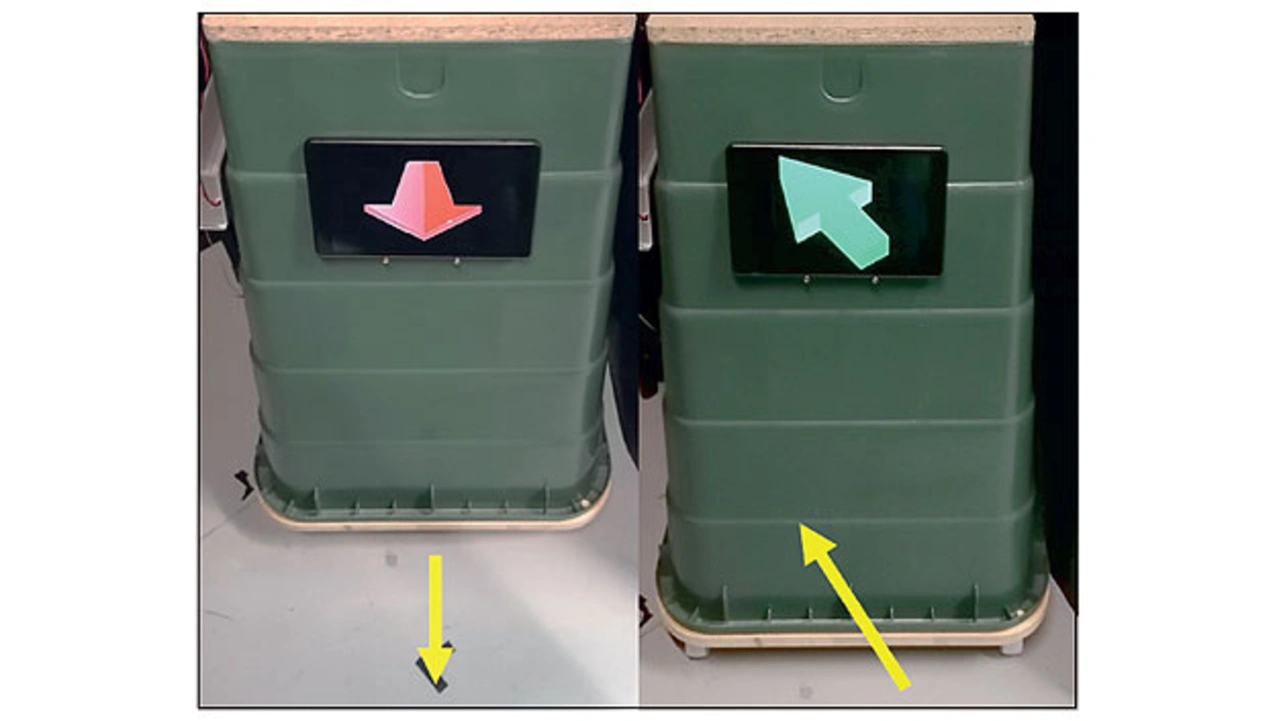
Eine Rückmeldung für Passanten kann über die Farbdarstellung geschehen: ein grüner Pfeil für eine erkannte freie Fahrbahn und rot für ein erkanntes Hindernis (Bild 3). Bei Projektionen auf den Boden muss die Größe der Projektionsfläche abgeschätzt werden. Sie darf nicht zu viel Platz beanspruchen, um auch bei hohem Besucheraufkommen und gedrängten Platzverhältnissen noch darstellbar zu sein und muss groß genug sein, um Kurvenfahrten anzuzeigen (Bild 4).

- Grundlagen der Human-Robot Interaction
- Testversuche zur Visualisierung der Fahrbahn