SPS in der Fahrzeugtechnik
Automation trifft Automotive
Fortsetzung des Artikels von Teil 1
Systementwicklung im V-Modell
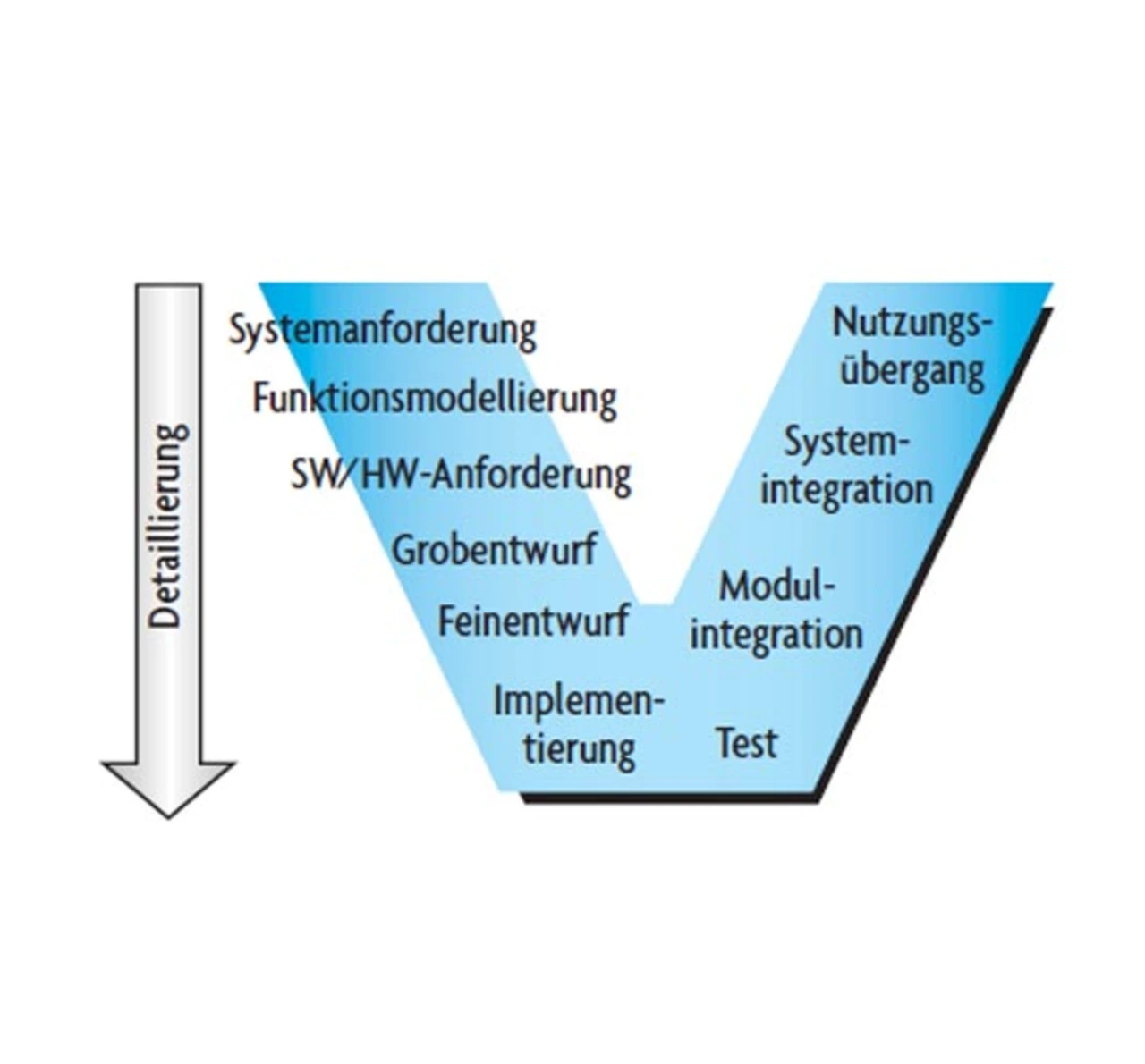
Unter Betrachtung der klassischen Entwicklung von Systemen im V-Modell (Bild 1) lässt sich zunächst feststellen, dass sich der geradlinige Entwicklungsansatz kaum realistisch abbilden lässt. Sowohl die industrielle Praxis als auch wissenschaftliche Arbeiten machen mehr als deutlich, dass die sequenzielle Bearbeitung von der Systemanforderung über die Funktionsmodellierung bis hin zur Implementierung mehr ein Wunschdenken denn Realität ist. Die Komplexität der Systeme übersteigt in der Regel die Fähigkeit der Entwickler, diese abzuschätzen, so dass es nicht selten zu Fehlern im Design kommt. Gerade in der Automobilindustrie haben sich in den letzten Jahren „Best-Practices“ herausgebildet, die eine iterative Entwicklung der frühen Phasen zulassen. Hierdurch lässt sich ein besseres Systemverständnis generieren, was zu einer sichereren Modellierung sowohl der Funktionen als auch der technischen Anforderungen führt. Vielfach lassen sich die Ansätze der agilen Software- Entwicklung und des „Extrem-Programmierens“ nutzen, die auf ein frühes Prototyping und eine Validierung der Ergebnisse in frühen Entwicklungsphasen bauen.
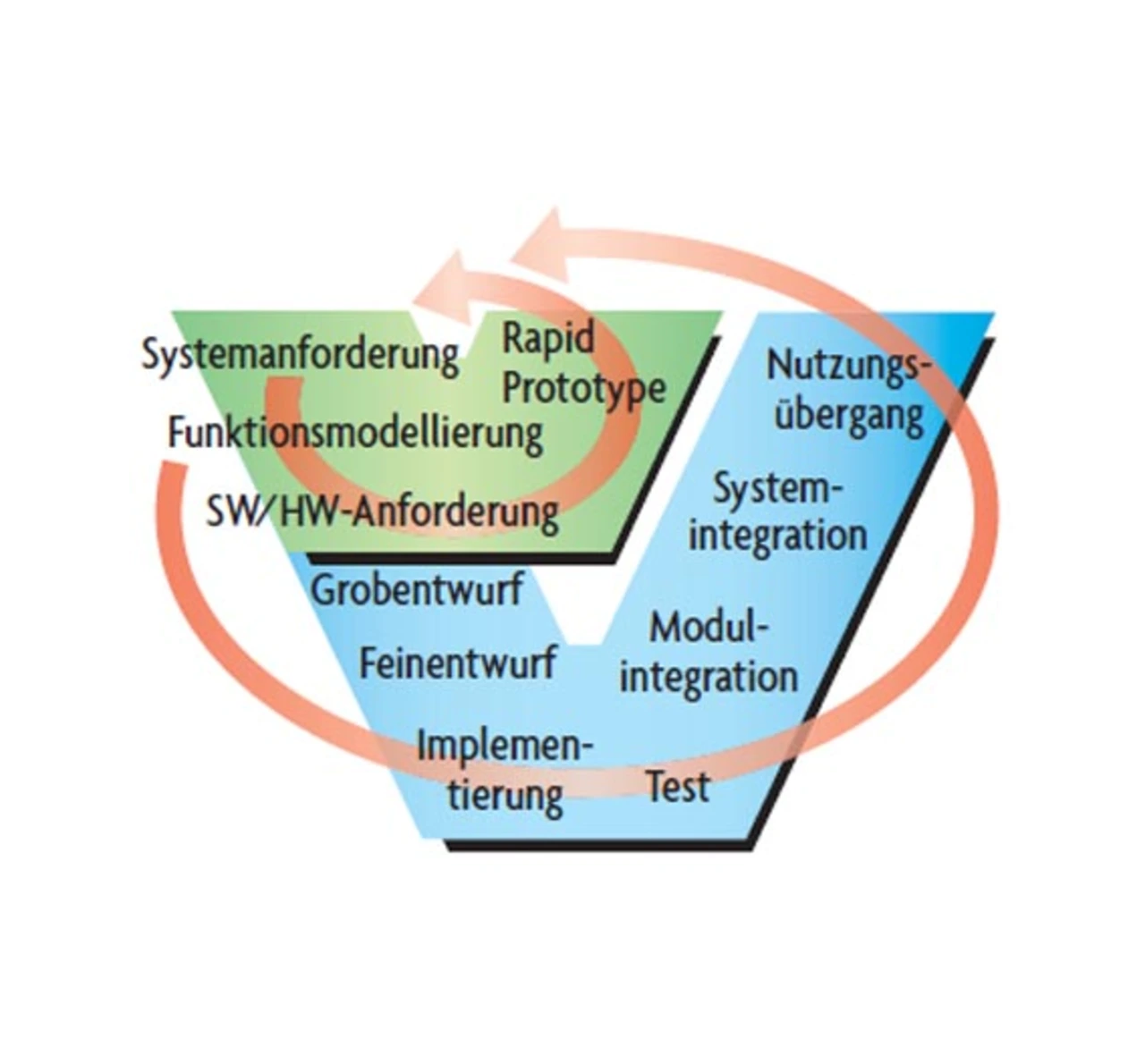
Bei der reinen Software-Entwicklung, beispielsweise für automobile ECUs, sind diese Entwicklungsschritte gut übertragbar. Die Betonung der frühen Phasen des V-Modells und die iterative Validierung durch Prototyping (Bild 2) ermöglichen es, die Anforderungsdefinition frühzeitig abzusichern, und führen so zu einer wesentlich geringeren Fehlerrate im weiteren Entwicklungsprozess. Die Anwendung agiler Entwicklungskonzepte bei komplexen mechatronischen Systemen ist nicht ohne weiteres realisierbar, da die gesamte Hardware und die Funktionselemente in der Anforderungsphase noch nicht existieren. Zwei Lösungsvarianten zeichnen sich aktuell ab. In einem ersten Schritt werden bei Systemen, die gut mathematisch modellierbar sind, Simulationsansätze – beispielsweise auf der Basis von Matlab/Simulink oder den entsprechenden proprietären Lösungen der unterschiedlichen Systemhäuser – verwendet. Ist eine Rückkopplung zur realen physikalischen Umgebung notwendig, muss in einem zweiten Schritt neben einer Simulationsumgebung auch auf Universalsteuergeräte zurückgegriffen werden, die dann die Sensorik und Aktorik bedienen. Nur so lassen sich die realen Anforderungen und die technologischen Randbedingungen, zu denen es noch keine geeigneten Modelle gibt, empirisch ermitteln. Die praktische Erfahrung zeigt, dass Universalsteuergeräte nicht immer die notwendigen Schnittstellen zu der gewünschten Sensorik und Aktorik aufweisen oder HiLSysteme aus Kostensicht kaum eine geeignete Lösung darstellen. Gerade für Zulieferer, die spezielle Einheiten und Systemmodule für die Fahrzeugtechnik entwickeln, sind die angebotenen HiL-Komponenten häufig nicht wirtschaftlich.
- Automation trifft Automotive
- Systementwicklung im V-Modell
- SPS für Funktionsprototypen
- Konfigurierbare CAN-Master-Klemme
- Anwendung
- AUTOSAR versus SPS – Wettbewerb oder Ergänzung?
Das könnte Sie auch interessieren
AUTOSAR leicht gemacht
Modellbasierte Entwicklung in einer AUTOSAR-Werkzeugkette
AUTOSAR
Berner & Mattner wird Artop-Mitglied
Entwicklung
Produktionsfreigabe von AUTOSAR-Basis-Software
Multi-Core-Plattform mit integriertem MCAL für TriCore und XC2000
AUTOSAR
Audi: Basis-Software-Module von Vector und TTTech
AUTOSAR
Auf dem Weg zum globalen Standard
Vector Informatik
MICROSAR IP für Smart Charging
AUTOSAR
Load Balancing in AUTOSAR-Multicore-Systemen (Teil 1)
AUTOSAR
Load Balancing in AUTOSAR-Multicore-Systemen (Teil 2)
