4D-Imaging-Radar und Co.
Die Zukunft des Kfz-Radars
Radar hat sich von einer teuren Zusatzausstattung für Fahrzeuge der gehobenen Klasse zu einer fast allgegenwärtigen Funktion in allen Preisklassen entwickelt. Wie geht es künftig weiter mit der Radartechnik?
Die IDTechEx-Studie »Automobilradar 2024-2044: Prognosen, Technologien, Anwendungen« zeigt, dass durchschnittlich 70 % der im Jahr 2022 ausgelieferten Neufahrzeuge über ein Frontradar und 30 % über Seitenradare verfügen. Da ADAS-Systeme immer ausgefeilter werden und nun erstmals autonome Systeme der Stufe 3 auf den Markt kommen, muss die Radartechnik verbessert werden, um die Leistungsanforderungen dieser Systeme zu erfüllen.
Deshalb kommen jetzt die ersten Generationen von 4D-Imaging-Radaren auf den Markt. Doch was ist überhaupt ein 4D-Radar, warum wird es benötigt und welche neuen Technologien kommen dabei zum Einsatz? IDTechEx gibt in seiner Studie Antworten hierauf.
Was ist ein bildgebendes 4D-Radar?
Ein 4D-Radar ist nicht automatisch ein bildgebendes Radar. Die beiden Begriffe können manchmal austauschbar erscheinen. IDTechEx ist jedoch der Meinung, dass es wichtig ist, zwischen den beiden Begriffen zu unterscheiden. In der Vergangenheit waren die meisten Radargeräte auf drei Dimensionen beschränkt, und zwar Azimut (horizontaler Winkel), Entfernung und Geschwindigkeit. Ein 4D-Radar bedeutet lediglich, dass ein gewisses Auflösungsvermögen in der Elevationsrichtung hinzukommt.
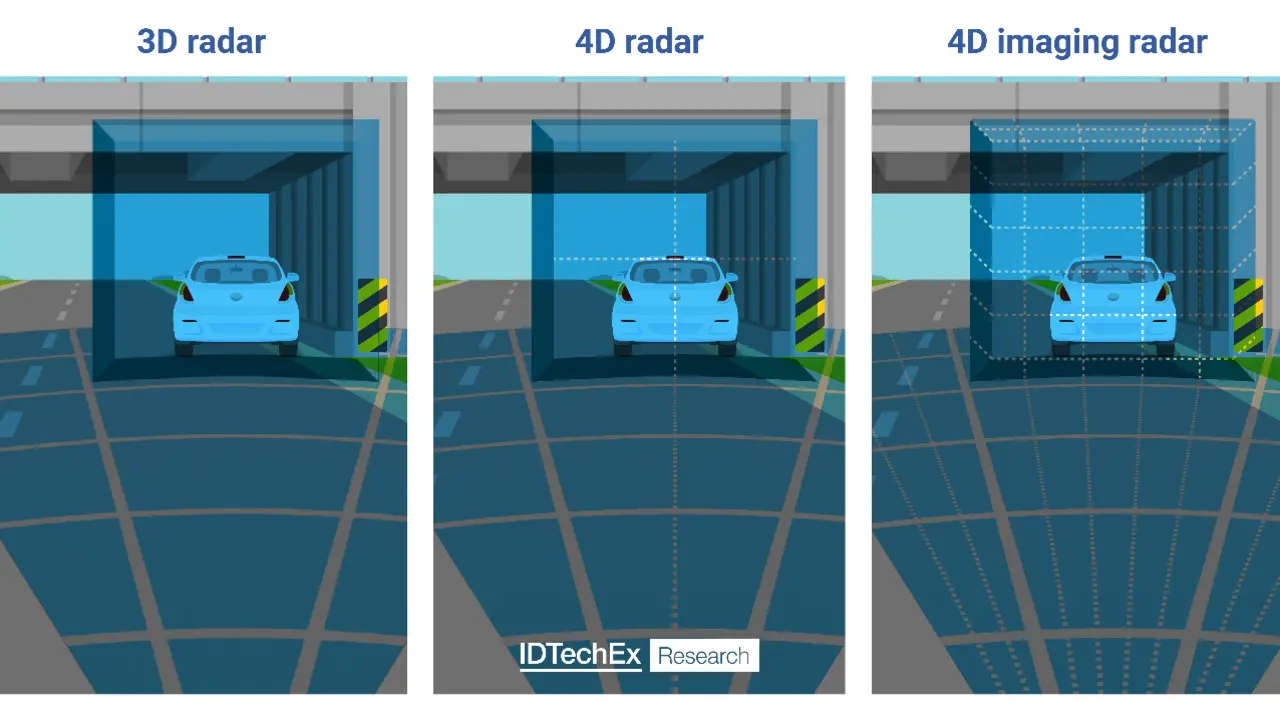
Ein klassisches Beispiel, das den Bedarf an dieser vierten Dimension verdeutlicht, ist das Szenario der Erkennung eines geparkten Autos in der Einfahrt eines Tunnels. Ein 3D-Radar liefert die gleichen Ergebnisse, egal ob sich ein Auto in der Einfahrt befindet oder nicht. Normalerweise geht das Fahrzeug davon aus, dass es sich bei der großen Reflexion um einen Tunnel handelt, und der adaptive Tempomat fährt weiter. Dieses Verhalten ist durchaus akzeptabel, wenn ein Mensch am Steuer sitzt und das ACC-System entsprechend übersteuern kann, aber es wird zu einem Problem für Fahrzeuge, die mit SAE-Level 3 und höher betrieben werden.
Theoretisch kann ein 4D-Radar dieses Problem lösen. Die zusätzliche vertikale Auflösung bedeutet, dass das Radar in der Lage sein sollte, das angehaltene Fahrzeug auf Bodenhöhe von dem Tunnel einige Meter über der Fahrbahn zu trennen. Wenn die vertikale Auflösung jedoch so schlecht ist, dass Tunnel und Auto immer noch im selben »Pixel« vorhanden sind, hat sich die Situation nicht verbessert.
4D-Radar versus 4D-Abbildungsradar
Hier kommt die Unterscheidung zwischen 4D-Radar und 4D-Abbildungsradar ins Spiel. Das abbildende Radar sollte eine ausreichende Winkelauflösung haben, um Tunnel und Fahrzeug auch bei sehr großen Entfernungen unterscheiden zu können. IDTechEx ist sogar der Meinung, dass ein abbildendes Radar über eine ausreichende Auflösung verfügen sollte, um viel kleinere Hindernisse auf große Entfernungen zu erkennen, beispielsweise eine Person auf der Straße in 100 m Entfernung.
Aber welche Auflösung ist dafür erforderlich? Wenn man davon ausgeht, dass die Person etwa 1,80 m groß ist, wäre eine Auflösung von etwa 1˚ erforderlich, um die Person von der Straße zu trennen. In diesem Szenario hätte das System genug Zeit, die Bremsen zu aktivieren und das Fahrzeug zum Stehen zu bringen, um eine Kollision zu vermeiden, selbst bei Autobahngeschwindigkeiten.
Eine Person zu erkennen ist eine Sache, sie allein mit den Radardaten korrekt als Person zu klassifizieren eine andere. Aus diesem Grund wird das Radar in der Regel durch nach vorne gerichtete Kameras für Anwendungen wie automatische Notbremsungen unterstützt. Bei Nacht, Nebel oder starkem Regen ist die Kamera möglicherweise nicht in der Lage, die Person zu erkennen. In solchen Situationen gibt es mehrere Möglichkeiten: Das Fahrzeug kann mit einer kurz- oder langwelligen Infraroterkennung ausgestattet werden, die eine kameraähnliche Auflösung bietet und auch bei schlechten Sichtverhältnissen robust ist. Das Fahrzeug kann mit einem LiDAR ausgestattet werden, das eine radarähnliche Entfernungsmessung ermöglicht, allerdings zu hohen Kosten, oder die Auflösung des Radars kann weiter verbessert werden.
Erreichen der 1˚-Auflösung und darüber hinaus
Für das Radar gibt es eine natürliche physikalische Grenze für das Auflösungsvermögen, das so genannte Rayleigh-Kriterium, das proportional zum Kehrwert der Frequenz multipliziert mit der Blendengröße ist. Kurz gesagt, ein normales Kfz-Radargerät, das bei 77 GHz betrieben wird und eine 10 cm breite Antennengruppe hat, sollte eine Auflösung von 2,8˚ erreichen können.
Zum Vergleich: Ein typisches menschliches Auge kann etwa 0,005 bis 0,01˚ auflösen, was ausreicht, um ein 1 cm großes Objekt in 100 m Entfernung zu sehen. Um die Auflösung des Radars zu verbessern, könnte seine Betriebsfrequenz erhöht werden, schließlich verwenden die Menschen sichtbares Licht, das im Terahertz-Bereich liegt. Die Frequenz des Radars ist jedoch durch Vorschriften begrenzt und kann nicht einfach geändert werden.
Die nächste Option ist die Vergrößerung der Blende. Dies ist zwar technisch möglich, stößt aber auf praktische Probleme. Um von 2,8˚ auf 1˚ zu kommen, muss die Apertur von 10 cm auf 28 cm vergrößert werden. Um diese Auflösung sowohl im Azimut als auch in der Elevation zu erreichen, ist das Radar nun 28 cm x 28 cm groß, was die Integration in den vorderen Stoßfänger erschwert. Es wird wahrscheinlich zu Problemen mit dem Luftstrom zum Kühler führen, könnte schwer vor Beschädigungen zu schützen sein und wird den Ästhetik-Teams der OEMs einiges Kopfzerbrechen bereiten.
Immer größere Radargeräte
IDTechEx hat festgestellt, dass Radargeräte immer größer werden, zum Beispiel das ARS540 von Continental, das FR5+ von Bosch und das Phoenix von Arbe, die alle über 10 cm groß sind, aber das größte dieser Geräte, das Phoenix, ist immer noch nur 12,7 cm x 14,3 cm groß.
Ein weiteres Problem bei der Entwicklung größerer Radargeräte ist die Belegung mit Kanälen. Die Entwicklung eines 28 cm x 28 cm großen Radars ohne die entsprechende Halbleitertechnologie wäre so, als würde man ein 10.000-Dollar-DSLR-Kameraobjektiv bauen und es mit einem 1-MP-Kamerahandysensor aus dem Jahr 2001 kombinieren. Das Analogon zu Pixeln sind hier virtuelle Kanäle, die ein Vielfaches der Sende- und Empfangskanäle (Tx und Rx) eines Radars sind. In der Vergangenheit hatte ein 3D-Radar vielleicht einen Sendekanal und drei Empfangskanäle (1Tx/3Rx).
Ein einfaches 4D-Radar würde wahrscheinlich einen Radartransceiver mit einer 3Tx/4Rx-Anordnung verwenden, während einige führende Radargeräte vier dieser Chips kombinieren, um eine 12Tx/16Rx-Anordnung mit 192 virtuellen Kanälen zu erhalten. Arbe hat einen Chipsatz entwickelt, der in einem einzigen Radargerät 48Tx/48Rx und damit 2.304 virtuelle Kanäle ermöglicht. Damit erreicht Arbe eine Auflösung von 1˚ im Azimut und 1,7˚ in der Elevation.
Verteilte Anordnung des Radars
Eine Möglichkeit, den Herausforderungen beim Bau eines sehr großen Radars zu begegnen, besteht darin, es irgendwie zu verteilen. IDTechEx hat einige Ansätze dazu gesehen. Ein Ansatz von Zendar besteht darin, zwei Radargeräte mit geringerer Leistung zu verwenden, die an gegenüberliegenden Enden des Stoßfängers angebracht sind und zusammenarbeiten.
Die Aperturgröße hat sich von weniger als 10 cm auf effektiv 1,5 bis 2 m erhöht. Die Auflösung der beiden zusammenarbeitenden Radargeräte beträgt im Azimut nur etwas mehr als 0,1˚. Der andere Ansatz, den IDTechEx gesehen hat, besteht darin, für jeden Kanal (bei einem 3Tx/4Rx-Radar) separate Antennenplatinen zu bauen und sie über der Stoßstange zu platzieren. Dies ist der Entwicklungsweg, der von Plastic Omnium und Greener Wave erforscht wird.
Software zur Verbesserung der Radarauflösung
Ein weiterer wichtiger Aspekt dieser Diskussion ist die Software, und fast alle hier erwähnten Unternehmen verwenden irgendeine Art von Software für die Superauflösung, um ihre Leistung zu verbessern. Um auf die Analogie zur Kamera zurückzukommen: Moderne DSLR-Kameras sind mit leistungsstarken Prozessoren ausgestattet, die das Beste aus einem Bild herausholen können, während die Kameras in modernen Mobiltelefonen über Jahre hinweg Software entwickelt haben, um die schärfsten, natürlichsten Ergebnisse zu erzielen. Im Radarbereich gibt es einige Beispiele für Start-ups, die beispielhafte Algorithmen zur Verbesserung der Radarauflösung entwickeln, ohne dabei physische Veränderungen vorzunehmen.
Zadar Labs nutzt Technologien wie maschinelles Lernen, KI und kodierte Übertragungssignale, um die Radarleistung zu verbessern. Spartan wiederum verwendet einen Algorithmus, der auf Forschungsergebnissen für F-18- und F-35-Kampfjets basiert. Super-Resolution-Software kann die Winkelauflösung um den Faktor 4 verbessern, so dass ein Standardradar mit 2,8˚ Winkelauflösung auf 0,5-1˚ und weniger reduziert werden kann, wenn es bereits einige der anderen hier erörterten Techniken anwendet.
Scanning ist eine weitere vielversprechende Option für Radar. Die Metamaterial-Antenne von Metawave nutzt Technologien zur Strahlformung und Strahlsteuerung, um die Leistung des Radars auf einen dünnen Fächer zu konzentrieren. Dieser Fächer wird dann durch das gewünschte Sichtfeld in Elevation gescannt und bietet eine verbesserte Auflösungsleistung sowohl in Elevation als auch in Azimut. Ein weiterer Vorteil dieser Technik besteht darin, dass die Strahlungsenergie über einen weitaus kleineren Bereich verteilt wird als bei einem Blitzverfahren, so dass größere Reichweiten erzielt werden können als bei einem nicht abtastenden Verfahren.
Der IDTechEx-Bericht
Wie kann man bei all diesen Optionen für den Aufbau der nächsten Radargeneration wissen, welche die beste ist? Der IDTechEx-Bericht geht noch mehr ins Detail, wie diese Technologien funktionieren und die Radarleistung verbessern. Der Bericht enthält auch eine Benchmarking-Analyse, in der diese Technologien in Bezug auf wichtige Leistungsindikatoren wie Winkelauflösung, Reichweite, Sichtfeld und Bildwiederholrate miteinander verglichen werden, um zu ermitteln, welche Technologie das beste Gesamtpaket bietet – mit einigen unerwarteten Ergebnissen.
Der Autor
Dr. James Jeffs
ist leitender Technologieanalyst bei IDTechEx.
