Evolution des smarten Fahrlichts
Von segmentierten Lichtern zu Pixel-Matrix-Scheinwerfern
Fortsetzung des Artikels von Teil 2
Serielle Arrays versus Parallelansteuerung
Zwar besteht in der Pixelmatrix weiterhin die Notwendigkeit, den LED-Strom mit der Weite des Projektionswegs anzuheben, allerdings bleibt die Gesamtleistung der Lichteinheit mit 60 bis 80 W unabhängig von der Anzahl der LEDs weitgehend konstant. Das bedeutet, dass mit steigender Anzahl an LEDs der Strom pro LED sinkt. Wo beim segmentierten Fahrlicht oder der Streifenmatrix pro Kanal in der Spitze bis zu 1,5 A benötigt wurden, sind in einer 100-Pixel-Matrix lediglich bis zu 300 mA pro LED nötig.
Durch das Herabsetzen des einzelnen LED-Stroms wird es nun wiederum möglich, diesen über einfache Linearstufen einzustellen und den Linearbetrieb mit PWM-Dimming-Frequenzen zu überlagern, um die jeweilige Helligkeit anzupassen.
Im Moment konkurrieren zwei Basisarchitekturen zur individuellen Ansteuerung von Lichtquellen. In der einen werden LEDs mit gleicher Strombemessung (meist LEDs einer Zeile) in einem Strang zusammengefasst. Die einzelnen LEDs werden dann durch parallele Bypassing-Schalter mit der Dimming-Frequenz angesteuert, um die individuelle Helligkeit anpassen zu können. Diese Technik bewährt sich bei kleineren Arrays, bei denen die Vorwärtsspannung über die resultierende Stranglänge in handhabbaren Bereichen bis circa 50 V liegt.
Dennoch erfordert diese Technik einige Aufmerksamkeit, da durch ein Kurzschließen einer oder mehrerer LEDs die resultierende Vorwärtsspannung für die verbleibenden aktiven LEDs zu groß ist. Hierdurch kommt es in der Regel zu Stromspitzen, die im Dauerbetrieb die Lebenszeit der LEDs deutlich reduzieren können. Wird die gesamte Matrix aus einem einzigen Wandler heraus versorgt, so dass die Versorgungsspannung nicht der Anzahl der verbleibenden LEDs angepasst werden kann, muss die Linearstufe den zum Teil erheblichen Spannungsunterschied ausgleichen, was größere Verluste nach sich zieht und somit weitere Kosten bei der Kühlung verursacht.
Eine mögliche Abwandlung dieser Topologie ist, jedem Strang mit unterschiedlichem Vorwärtsstrom eine eigene, getaktete Aufwärtswandler-Stromquelle vorzusetzen.
Diese gleicht dann mehr oder weniger automatisch den Einbruch in der Vorwärtsspannung effizient aus. Allerdings besteht auch hier weiterhin das Problem der auftretenden Stromspitzen und durch die höhere Anzahl an eigenständigen Wandlern steigen zudem Platzbedarf und Kosten der Elektronik. Trotz der offensichtlichen Nachteile wird die Topologie gern verwendet, wenn die Elektronik nicht direkt am LED-Array platziert werden kann, um die Ströme und damit die Verluste in den Versorgungsleitungen gering zu halten. Dabei darf allerdings nicht vergessen werden, dass kleine Ströme auf der Ausgangsseite große Ströme auf der Eingangsseite bedeuten, die auch den Bedarf an deutlich größeren Eingangsfiltern nach sich ziehen und letztendlich bei der Auslegung der Zuleitungen von der Batterie berücksichtigt werden müssen.
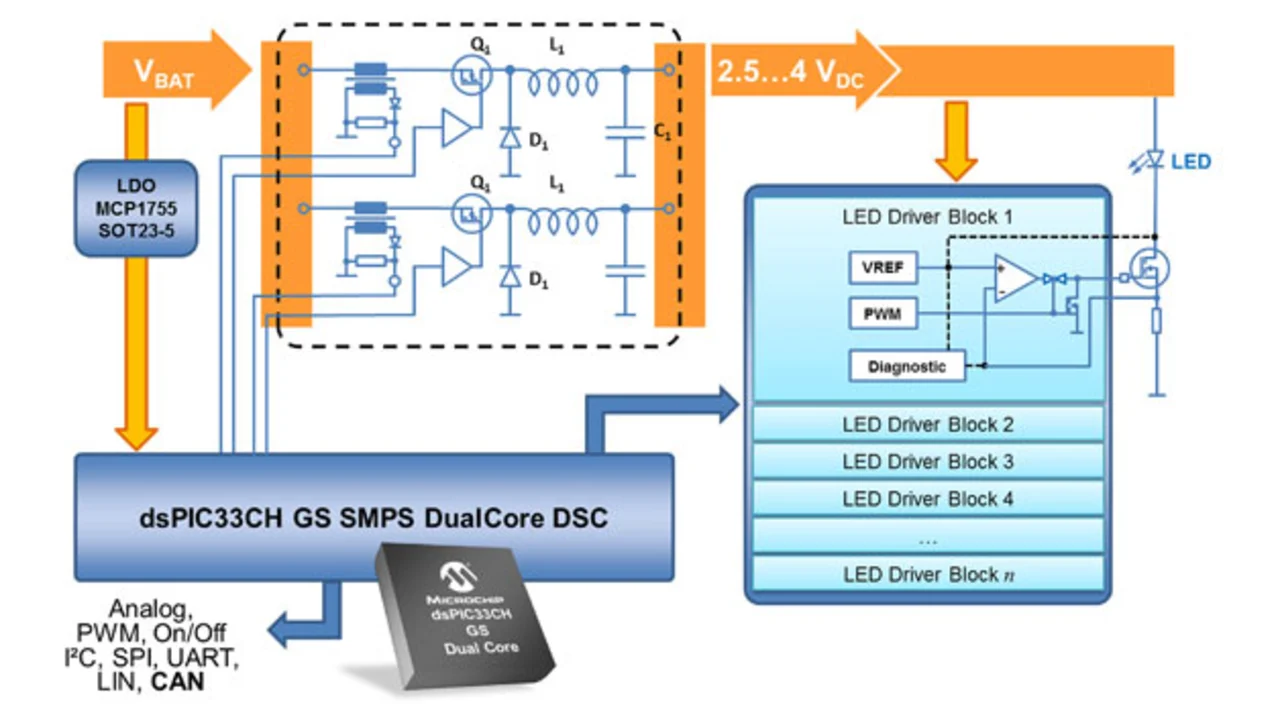
Von der Ansteuerung her deutlich einfacher und unkritischer ist im Gegensatz dazu der Aufbau einer klassischen Parallelansteuerung. Hierbei wird jeder LED eine einfache Linearstufe untergesetzt und das gesamte Array über eine gemeinsame Anoden-Busspannung versorgt (Bild 5). Die Aufgabe der Linearstufen ist es, die Unterschiede innerhalb der verschiedenen Vorwärtsspannungen der einzelnen LEDs auszugleichen und deren Strom konstant zu halten. Beim Ein- und Ausschalten einzelner LEDs entstehen keine Stromspitzen, was eine maximale Lebensdauer der LEDs gewährleistet. Auch unterstützt diese Verschaltung eine schnellere Ansteuerung, wodurch mit deutlich höheren Dimming-Frequenzen gearbeitet werden kann und somit ein erweiterter Bereich für den Interferenzabgleich mit den optischen Erkennungssystemen des Fahrzeugs zur Verfügung steht.
- Von segmentierten Lichtern zu Pixel-Matrix-Scheinwerfern
- Streifenmatrix-Scheinwerfer und Pixelmatrix-Scheinwerfer
- Serielle Arrays versus Parallelansteuerung
- Pixel-Matrix-Achitektur: Vor- und Nachteile
Lesen Sie mehr zum Thema
