Evolution des smarten Fahrlichts
Von segmentierten Lichtern zu Pixel-Matrix-Scheinwerfern
Fortsetzung des Artikels von Teil 1
Streifenmatrix-Scheinwerfer und Pixelmatrix-Scheinwerfer
Um die Auflösung der Lichtverteilung vor allem im Fernlichtbereich zu erhöhen, wurden daher im nächsten Schritt die asymmetrischen Fernlichtsegmente durch gleichmäßige Streifensegmente ersetzt (Bild 3). Durch die in etwa verdoppelte Auflösung können nun größere Bereiche im Fernlichtbereich beleuchtet und komplexere Verkehrsbedingungen (z.B. kurvige Straße) abgedeckt und Funktionen wie adaptives Kurvenlicht umgesetzt werden. Allerdings birgt die Spalteneinteilung der Lichtverteilung einige wesentliche Nachteile, weshalb diese Technologie nur eine kurzfristige Übergangslösung darstellen wird.
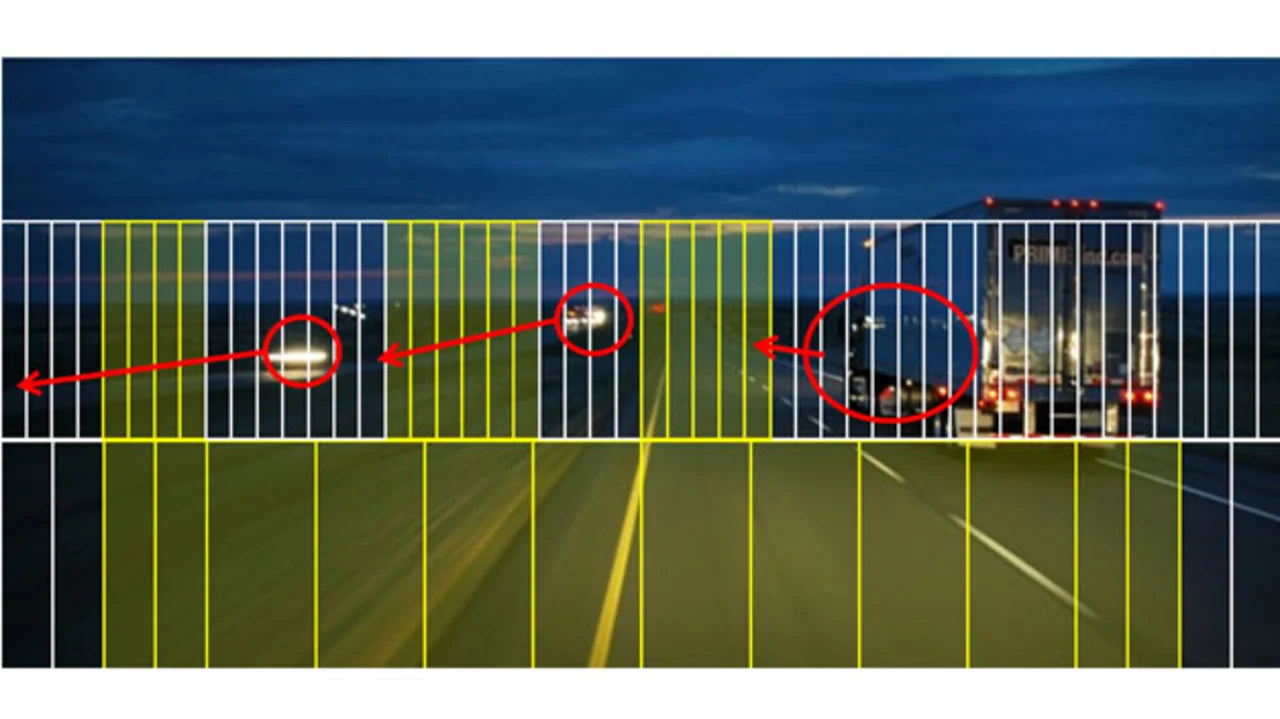
Anders als beim segmentierten Fahrlicht wird bei der Spaltenmatrix pro Lichtspalt eine Multi-Chip-LED horizontal über einem schmalen Spiegelsegment platziert. Dieser Spiegel projiziert dann den vertikalen Lichtstreifen auf die Straße. Gegenüber der Direktoptik ergeben sich hierbei zwei Probleme. Erstens werden durch den Spiegel die Lichtverluste – wenn auch nur in geringem Ausmaß – erhöht. Zweitens wird der Lichtstrahl nach dem Spiegel nicht gebündelt, was zu einer mit der Entfernung zunehmenden Unschärfe in der Auflösung führt.
Neben diesen konstruktiven Einschränkungen ergibt sich jedoch noch ein wichtiger, systemimmanenter Nachteil.
Die Spaltensegmentierung erstreckt sich vom nahen Abblendlicht bis hin zum weiten Fernlichtbereich. Beim Abschalten eines dieser Segmente entsteht ein vom Fahrer deutlich wahrnehmbarer, bewegter Schatten. Bei höherer Verkehrsdichte entwickelt sich dadurch ein unter Umständen störender oder gar ablenkender optischer Schattenspiel-Effekt.
Pixelmatrix-Scheinwerfer
In einem weiteren Schritt werden die eben genannten Nachteile durch eine weitere Erhöhung der Auflösung und die Wiedereinführung der Direktoptiken beseitigt. Die sogenannte Pixelmatrix trägt ihren Namen zu Recht, da die Einteilung der Lichtsegmente, aber auch die Anordnung der LEDs zueinander einige Analogien mit Displaysteuerungen aufweisen. In der Regel besteht eine Pixelmatrix-Einheit aus symmetrischen, spalten- und zeilenförmig angeordneten LED-Arrays.
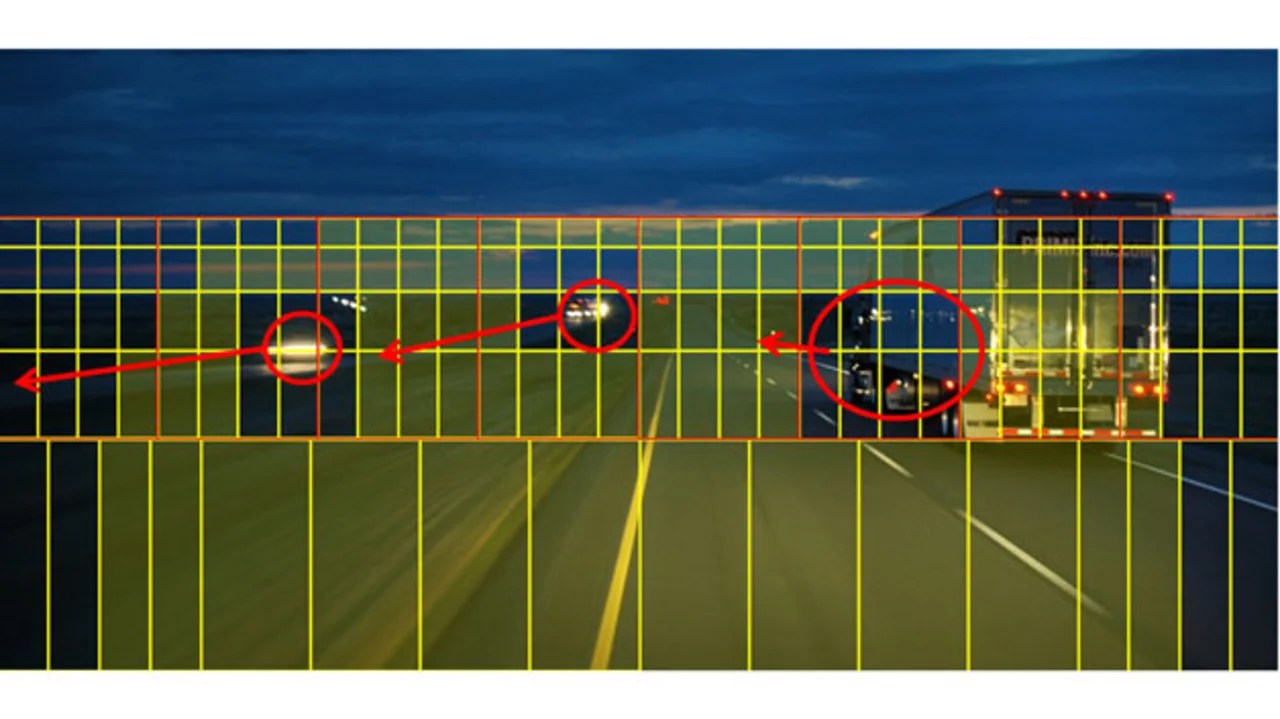
Das Licht dieser einzelnen Punktquellen lässt sich entweder über Primär- und Sekundäroptiken oder neuerdings über kompakte Einzeloptiken aufnehmen, bündeln und mit der Entfernung steigender Auflösung auf die Straße projizieren. Die dadurch entstehende Lichtverteilung (Bild 4) erlaubt nun ein präzises Ausblenden von Verkehrsteilnehmern ohne störende Schattenbildung, das gezielte Anleuchten von versteckten Hindernissen sowie die Umsetzung von adaptivem Kurvenlicht. Die Anzahl der verwendeten LEDs schwankt in derzeitigen Designs zwischen 40 und 100 Pixeln pro Scheinwerfer, steigt jedoch stetig an.
Diese Art von Fahrlichtern verspricht die bestmögliche Ausleuchtung dunkler Bereiche im Fahrweg bei gleichzeitig effektivster Blendverhinderung anderer Verkehrsteilnehmer. Allerdings erfordert die Umsetzung eines Treibers für bis zu 100 oder mehr individuell steuerbare Lichtquellen eine neue Herangehensweise.
- Von segmentierten Lichtern zu Pixel-Matrix-Scheinwerfern
- Streifenmatrix-Scheinwerfer und Pixelmatrix-Scheinwerfer
- Serielle Arrays versus Parallelansteuerung
- Pixel-Matrix-Achitektur: Vor- und Nachteile
Lesen Sie mehr zum Thema
