Entwicklung + Test
Mehr Kerne – aber sicher
Fortsetzung des Artikels von Teil 1
Systematische Vorhersage und Optimierung
General Motors sollte in Zukunft in der Entwicklung die Echtzeit-Vorhersage und Systemoptimierung so früh wie möglich durchführen und erst danach die Zuordnung von Funktionen zu Architekturkomponenten festlegen, so Paolo Giusto. Dies reduziert die Systemkomplexität und damit die Entwicklungszeit. Im Rahmen der Entwicklung eines Spurhalteassistenten wurden die Vorteile dieses Vorgehens anhand einer Doppelprozessor-ECU für Fahrerassistenzsysteme und Aktive Sicherheit demonstriert. Dabei wurde SymTA/S verwendet, um die Prozessorauslastung, den Jitter von Tasks und Signalen sowie Best-Case- und Worst-Case- Task-Antwortzeiten und Signalverzögerungen entlang von Wirkketten vorherzusagen. Auf Basis dieser Vorhersagen wurde die Systemkonfiguration optimiert, um die Echtzeit-Anforderungen zu erfüllen. Um die mit der Einführung einer neuen Technologie stets verbunden Vorbehalte und Herausforderungen zu meistern, haben Giusto und seine Kollegen vom „GM Silicon Valley Advanced Technology Office“ in Palo Alto, CA (USA), und dem „GM ECI Lab“ in Warren, MI (USA), zusammen mit den Experten von Symtavision große Teile der für die Echtzeit- Analysen notwendigen Datenerfassung und Modellbildung übernommen. Giusto erläutert, dass der initiale Aufwand sich in dem Moment amortisiert hatte, als die ersten Sym- TA/S-Ergebnisse vorlagen und den Systemarchitekten aus dem Serienprojekt darlegen konnten, an welchen Stellen und warum mit Engpässen und kritischen Deadline-Verletzungen zu rechnen ist und wie diese behoben werden können. Zu diesem Zeitpunkt konnten die an der Architektur notwendigen Modifikationen noch ohne Zeitverlust vorgenommen werden. Die Ergebnisse führten zu einem breiten Interesse an SymTA/S im GM-Entwicklungsbereich.
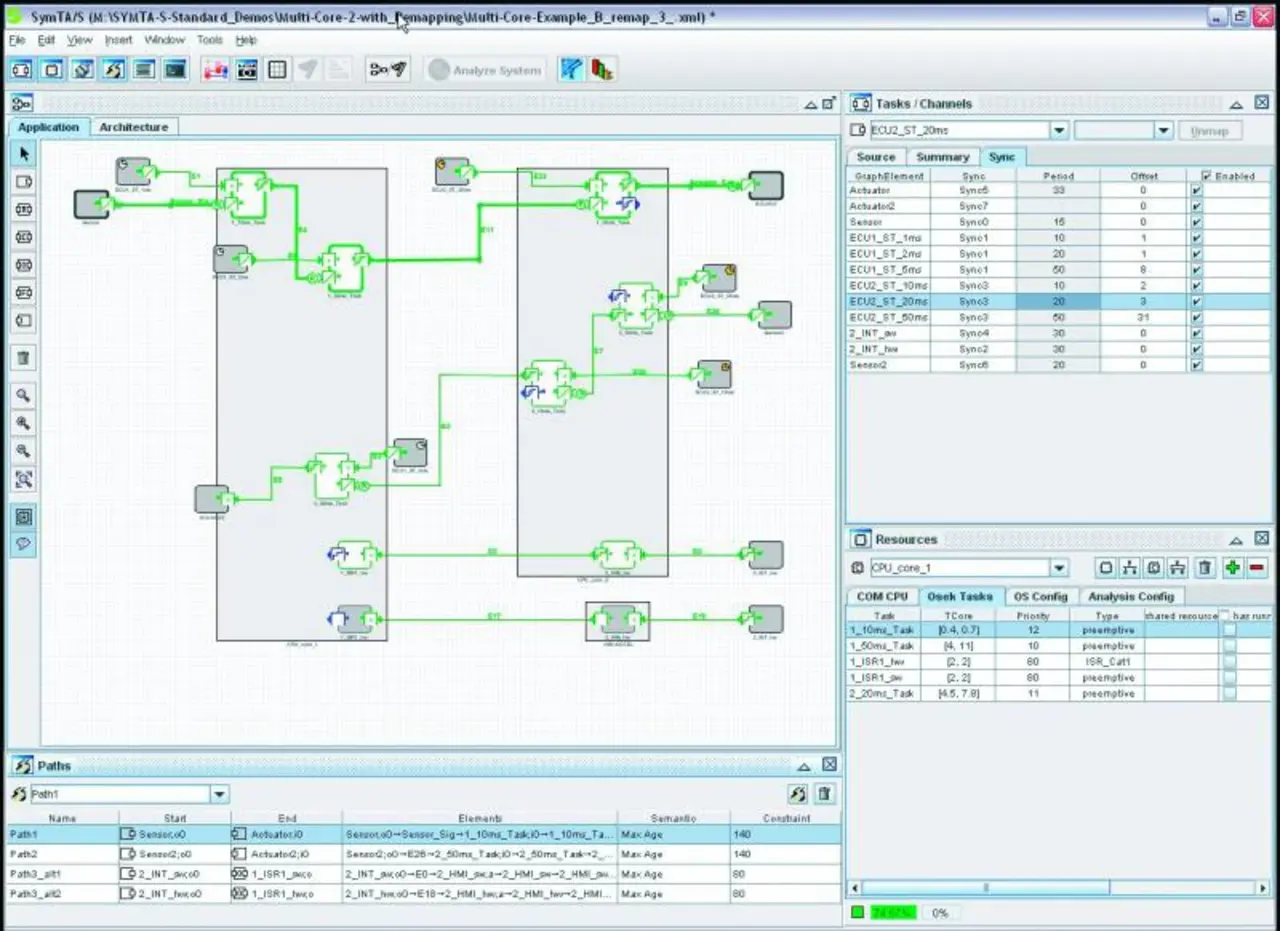
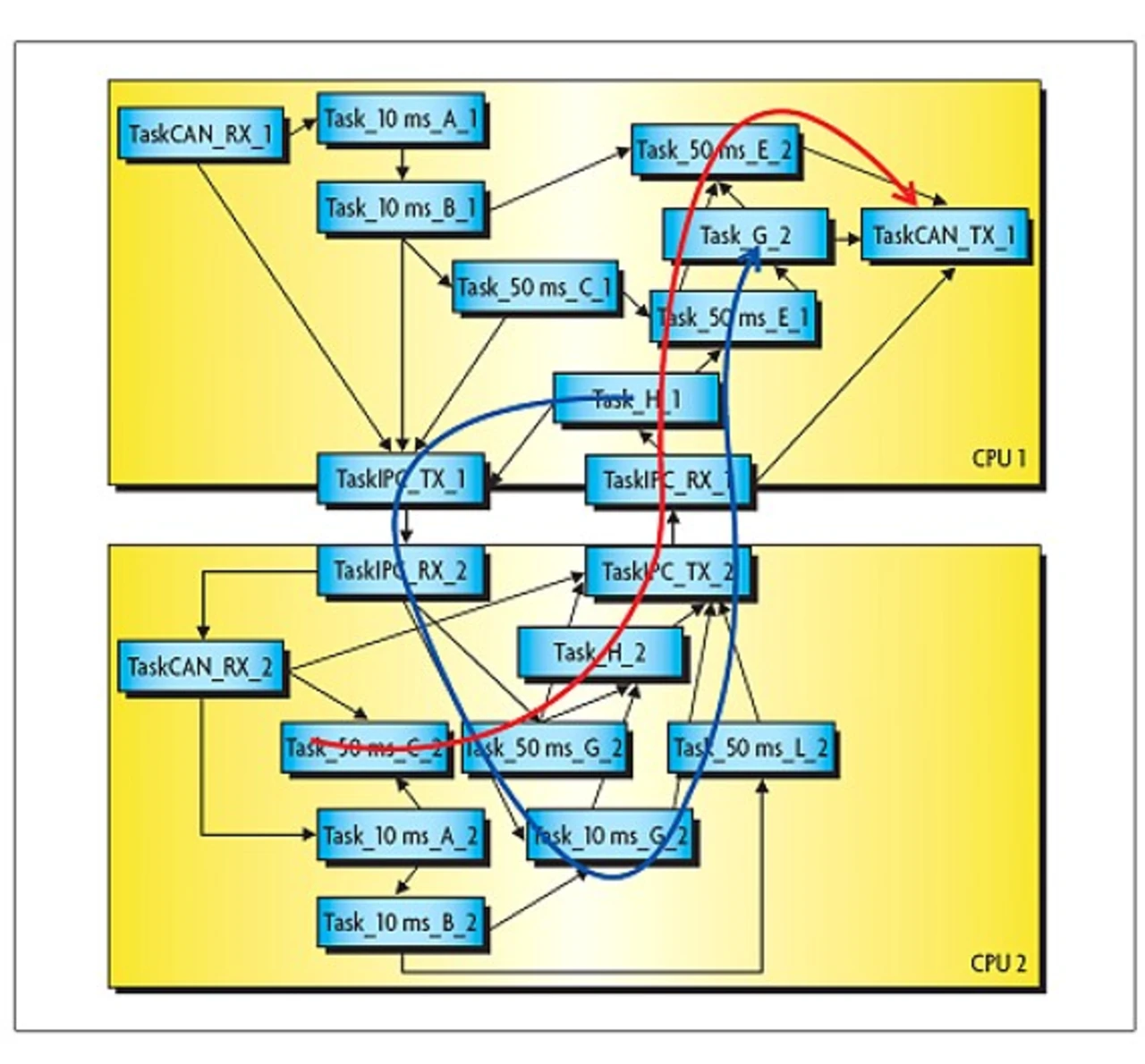
Auf der Symtavision NewsConference im Oktober 2009 stellte Paolo Giusto detailliert dar, wie General Motors’ Voraus- und Serienentwicklung beim SymTA/S-basierten Entwurf des neuen „Dual-Processor Active Safety Module“ kooperierten. Das System besteht aus gut 20 Tasks mit insgesamt über 1000 Funktionen (Bild 2). Es ist ein Multi-Raten-System, d.h., es laufen Tasks und Funktionen in unterschiedlichen Rastern, die zum Teil miteinander synchronisiert sind. Hinzu kommen ereignisgesteuerte Tasks. Das Scheduling verläuft nach OSEK mit statischen Prioritäten und einer Kombination aus preemptivem und kooperativem Scheduling. Es ist eine periodische Inter- Processor-Communication (IPC) eingerichtet, um Konflikte auf dem gemeinsam genutzten Speicher zu minimieren. Die Anbindung an den CANBus ist auf CPU1 realisiert, dabei sind kritische Sende-Nachrichten mit dem Task-Schedule synchronisiert, sonst ist die Anbindung asynchron.
Die Timing-Analysen sollten das Vermeiden von Überlastsituationen auf den CPUs garantieren und die maximalen Laufzeiten zweier kritischer Signale absichern. Dabei handelt es sich um End-to-End-Wirkketten über Prozessorgrenzen hinweg (in Bild 2 farblich hervorgehoben). Die beiden Signalwege sind Teil einer Dual-Path- Strategy mit einem „Primary“- und einem „Secondary“-Signalweg, mit der GM sicherheitskritische Teile der Anwendung nach dem Redundanzprinzip doppelt absichert. Die zulässige Obergrenze für die Signalverzögerung liegt jeweils bei 100 ms. Hinzu kommt eine weitere Echtzeit-Anforderung: Beide Berechnungen müssen möglichst zeitgleich beendet sein, die Differenz der Verzögerungen darf nicht mehr als 10 ms betragen. Dabei muss auch der Signal-Jitter berücksichtigt werden. Zunächst wurden die Informationen aus dem bestehenden Funktionsmodell und dem Architekturmodell in ein initiales SymTA/S-Modell überführt (Schritt #0 in Bild 3). Zusammen mit den Laufzeitinformationen der einzelnen Funktionen entstand daraus das SymTA/S-Modell für die Analyse (Schritt #1). Die Analyseergebnisse von SymTA/S wurden als Grundlage für weitere Optimierungen (Schritt #2) verwendet. Abschließend wurden die Ergebnisse mit einem GMIn- House-Werkzeug für die statistische Auswertung (Schritt #3) überprüft. Das Einbetten von SymTA/S in diesen Prozess war durch die Vielzahl von Import/Export-Schnittstellen von SymTA/S und die Möglichkeit der Steuerung über Skripte problemlos möglich.
- Mehr Kerne – aber sicher
- Systematische Vorhersage und Optimierung
- Frühzeitige Darstellung von Engpässen spart Kosten
- Timing-Analyse wird bei AUTOSAR-Einführung noch wichtiger
Lesen Sie mehr zum Thema
Das könnte Sie auch interessieren
Symtavision GmbH
Tool-Suite ermöglicht integrierte modell- und trace-basierte Timing-Analyse
Symtavision
Echtzeitverhalten zehnmal schneller analysieren
Symtavision
Entwicklungswerkzeug unterstützt Multicore-Prozessoren und AUTOSAR
Symtavision
Portierung von ECU-Software für Single- auf Multi-Core
Steuergeräte-Software-Entwicklung
Mit Varianten-Management erfolgreich zum Ziel
