Feldorientierte Antriebssteuerung
Sensor regelt Motor
Fortsetzung des Artikels von Teil 1
Sensor regelt Motor
Anstatt jede Phase einzeln zu regeln, beeinflusst die FOR den resultierenden Vektor aus den drei Phasenströmen. Die Regelvariablen für einen Wechselstrom-Induktionsmotor werden mithilfe mathematischer Transformationen statisch gemacht (DC).
Im Prinzip dient das FOR-Verfahren dazu, einen Induktionsmotor durch Imitation eines DC-Motors zu regeln, indem man mit statischen Parametern arbeitet.
Es kommen zwei verschiedene FOR-Methoden zur Anwendung. Bei der direkten FOR errechnet sich der Winkel des Rotorflusses direkt aus Schätzungen oder Messungen des Flusses.
Bei der indirekten FOR dagegen ergibt sich der Winkel des Rotorflusses indirekt aus vorhandenen Drehzahl- und Schlupfberechnungen. Bei der FOR mit Sensoren gilt folgender Arbeitsablauf (Bild 2):
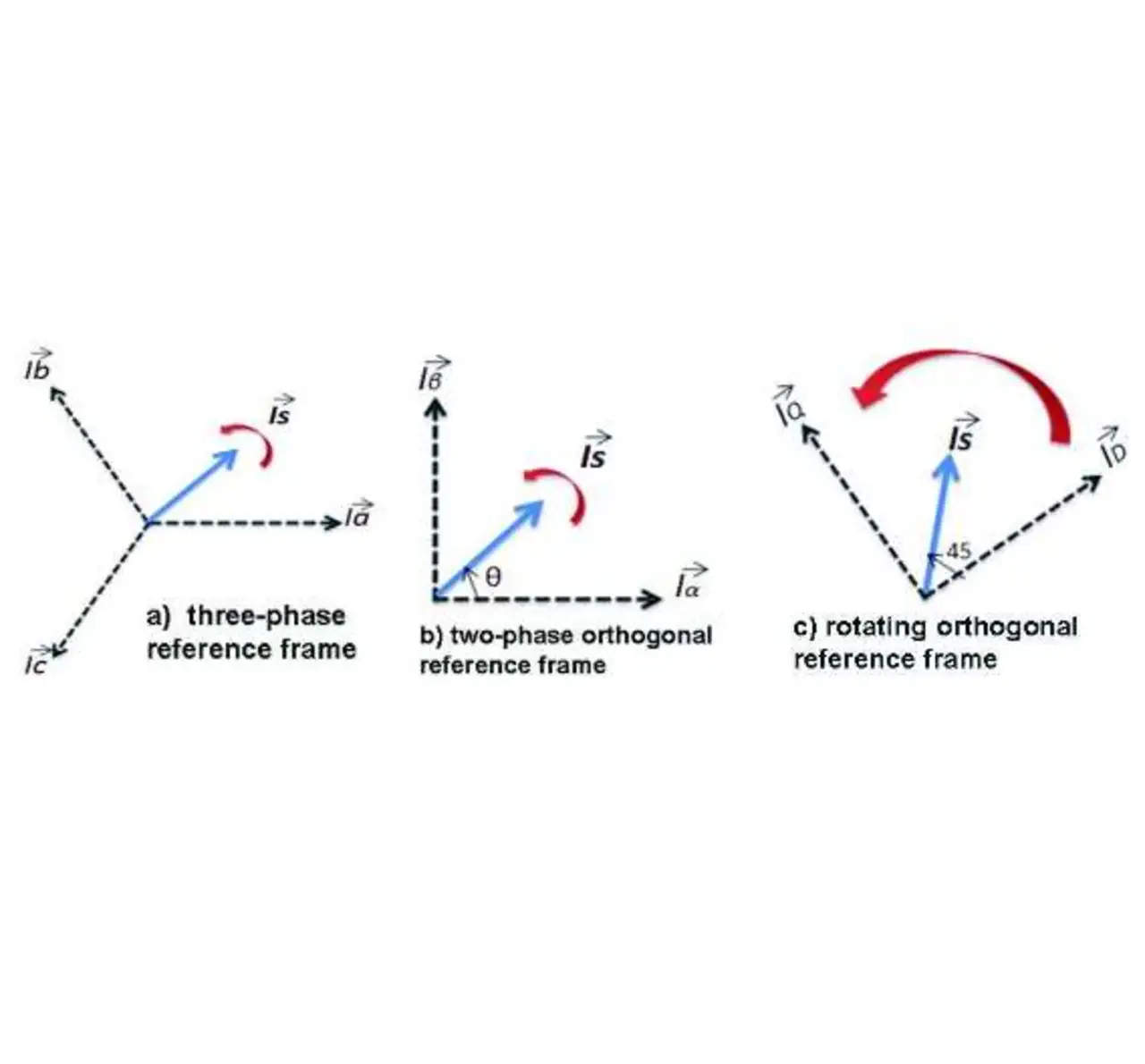
- Schritt 1: Zwei Statorphasenströme werden gemessen, der dritte nach der Kirchhoffschen Regel ermittelt: Ia + Ib + Ic = 0.
- Schritt 2: Mithilfe der Clarke-Transformation werden die drei Phasenströme aus dem dreiachsigen Bezugssystem des Stators in ein zweiachsiges Koordinatensystem umgewandelt: (Ia, Ib, Ic) –> (Iα, Iβ).
- Schritt 3: Die Komponenten im zweiachsigen Koordinatensystem des Statorstroms sind von Natur aus zeitvariant, und es ist sehr komplex, ihnen mit traditionellen PI-Reglern zu folgen. Stattdessen wird die stationäre Referenz entsprechend der mit Sensoren oder anhand der Gegen-EMK bestimmten Rotorposition gedreht, sodass sich traditionelle PI-Regler eignen, um etwaige Fehler zu kompensieren. Dazu dient die d/q-Transformation, auch Park-Transformation genannt: (Iα, Iβ) –> (Id, Iq). Darin sind Id und Iq der phasenrichtige beziehungsweise der um 90° phasenversetzte Anteil des Statorstroms bezogen auf den Rotor.
- Schritt 4: Sobald die Vektoren zeitinvariant sind, lassen sich die zugehörigen Achsenvektoren mit der Referenz vergleichen. Mit einem PI-Regler (siehe Gleichung (1)) für jede Achse kann das Fehlerkorrektursignal bestimmt werden. Die Referenz Id regelt den Magnetisierungsfluss des Rotors, die Referenz Iq dagegen das vom Motor erzeugte Drehmoment.

- Schritt 5: Die zugehörigen Ausgänge des PI-Reglers werden anschließend mit inversen Park- beziehungsweise Clarke-Transformationen in die dreiphasige Statorreferenz zurückverwandelt.
- Schritt 6: Die so generierten dreiphasigen Referenzsignale modulieren das PWM-Signal per Raumzeigermodulation.
- Sensor regelt Motor
- Sensor regelt Motor
- Sensor regelt Motor
Lesen Sie mehr zum Thema
