Feldorientierte Antriebssteuerung
Sensor regelt Motor
Die feldorientierte Regelung bürstenloser Gleichstrommotoren hat gegenüber anderen Methoden einige Vorzüge, besonders wenn hohe Präzision gefragt ist. Mithilfe spezieller Positionssensoren lässt sich die Auflösung weiter deutlich erhöhen.
Elektromotoren lassen sich grob in drei Klassen einteilen: Wechselstrom-, Gleichstrom und Universalmotoren. Während sich die erforderliche Stromart bei den beiden ersten Typen aus dem Namen ergibt, sind Universalmotoren sowohl für Gleich- als auch für Wechselstrom geeignet.
Zu den Wechselstrommotoren, die wiederum in ein- und mehrphasige Motoren unterteilt sind, gehören Induktions- und Kurzschlussläufer-Motoren. Zu den Gleichstrommotoren zählen solche mit Bürsten ebenso wie bürstenlose Motoren (Brushless DC – BLDC) und Schrittmotoren.
Gleichstrommotoren lassen sich im Vergleich zu Wechselstrommotoren recht einfach ansteuern, und zwar mit einer direkten Beziehung zwischen Spannung und Frequenz (U/f): Je höher die angelegte Spannung, umso höher ist die Frequenz beziehungsweise Drehzahl.
Diese Art der Ansteuerung wird in der Regel bei DC-Motoren mit Bürsten angewandt. Bei Wechselstrommotoren und einigen Antrieben, in denen der Controller die angelegte Gleichspannung in eine Wechselspannung zum Ansteuern des Motors (beispielsweise eines BLDC- oder Permanentmagnet-Synchronmotors) verwandelt, benutzt man komplexe Ansteueralgorithmen, um die Motorwicklungen in der richtigen Sequenz für die beabsichtigte Drehrichtung zu bestromen. Die Rate, mit der die Wicklungen hierfür kommutiert werden, ist proportional zur Motordrehzahl.
Die Auswahl geeigneter Ansteueralgorithmen ist groß:
- Trapezansteuerung: Dieses auch als Sechsschritt-Ansteuerung bezeichnete Verfahren stellt den einfachsten Algorithmus dar. Für jeden der sechs Kommutierungsschritte wird ein Stromweg zwischen jeweils zwei Wicklungen geschaltet, während die dritte Wicklung unbestromt bleibt. Nachteilig an dieser Methode ist die hohe Drehmoment-Welligkeit, die zu Vibrationen, starker Geräuschentwicklung und einer gegenüber anderen Algorithmen beeinträchtigten Leistungsfähigkeit führt.
- Sinusansteuerung: Diese Methode vermeidet viele Nachteile der Trapezansteuerung, indem sie die drei Wicklungen mit einem sich sinusförmig, also stetig verändernden Strom ansteuert. Die Drehmoment-Helligkeit verringert sich hierdurch und der Motor dreht gleichmäßig. Da diese zeitlich veränderlichen Ströme jedoch mit einfachen PIReglern erzeugt werden, ist die Leistungsfähigkeit bei höheren Drehzahlen nicht zufriedenstellend.
- Feldorientierte Regelung (FOR): Dieses auch als Vektorregelung bezeichnete Verfahren arbeitet bei hohen Drehzahlen effizienter als die Sinusansteuerung. Da der Fluss in Rotor und Stator stets perfekt aufrechterhalten wird, garantiert diese Regelung außerdem einen optimalen Wirkungsgrad bei wechselnden Betriebsbedingungen. Auch dynamische Lastwechsel bewältigt die FOR besser als alle anderen Techniken.
Die Drehzahl wird aus dem zeitlichen Abstand zwischen zwei steigenden oder fallenden Flanken eines Hallsensor-Signals hergeleitet. Diese elektrische Periodendauer ist der Kehrwert der elektrischen Frequenz beziehungsweise der Drehzahl. Durch Aufsummieren dieses elektrischen Drehzahlwertes in jedem FOR-Zyklus lässt sich die Rotorposition θ ermitteln.
Im vorliegenden Beispiel dauert ein FOR-Zyklus 200 μs. Es gilt die Beziehung θ = ωt, wobei θ der Winkelabstand in Sekunden ist, ω die Winkelgeschwindigkeit und t das Zeitintervall für die Berechnung von θ. Die Rotorposition θ lässt sich anstatt mit Hallsensoren auch mit einem Encoder ermitteln, der die Information ohne Aufsummieren der Drehzahl direkt ausgibt.
Feldorientierte Regelung
Die feldorientierte Regelung gehört zu den Methoden, die bei der frequenz- oder drehzahlvariablen Ansteuerung verwendet wird, um durch Regelung des Stroms das Drehmoment (und damit die Drehzahl) von Drehstrom-Elektromotoren zu beeinflussen. Mit der FOR lassen sich Drehmoment und Fluss unabhängig regeln.
Die FOR bietet ein schnelleres dynamisches Ansprechverhalten, als es für Anwendungen wie zum Beispiel Waschmaschinen erforderlich ist. Es tritt keine Drehmomentwelligkeit auf, und bei niedrigen und hohen Drehzahlen lässt sich der Motor gleichmäßiger und präzise regeln.
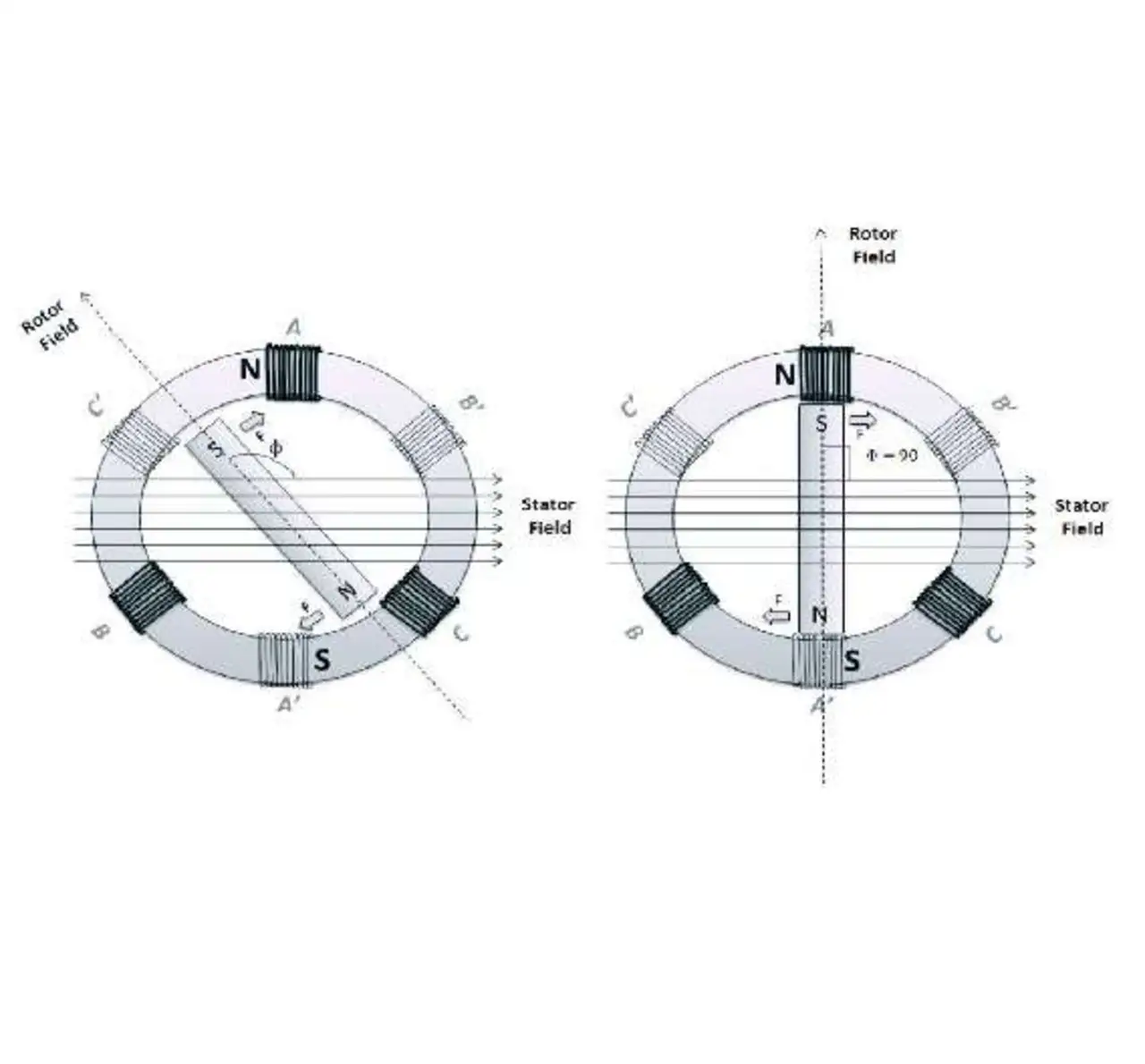
Das Drehmoment eines Induktionsmotors erreicht ein Maximum, wenn Stator- und Rotorfeld im rechten Winkel zueinander stehen. Bei der FOR werden die Statorströme gemessen und so eingestellt, dass der Winkel zwischen Rotor- und Statorfluss stets 90° beträgt und somit ein maximales Drehmoment entsteht (Bild 1).
- Sensor regelt Motor
- Sensor regelt Motor
- Sensor regelt Motor
Lesen Sie mehr zum Thema
