Cloud-basierte Diagnosedienste
Fahrzeugdiagnose für den gesamten Fahrzeuglebenszyklus
Das Software-definierte Fahrzeug verlangt nach einer umfassenden Diagnoselösung, die über die werkstattgebundene Fahrzeugdiagnose hinausreicht. Zunehmende Vernetzung und zentralisierte zonale E/E-Architekturen bieten hierbei neue Chancen.
Der Wandel hin zu zentralisierten E/E-Architekturen mit Hochleistungsrechnern (High-Performance Computers, HPCs) definiert das Fahrzeug grundlegend neu. Es wird zum hochgradig vernetzten, Software-definierten System, dessen Funktionen nicht länger zum SOP (Start of Production) finalisiert sind, sondern kontinuierlich weiterentwickelt und über seinen gesamten Lebenszyklus hinweg per Software-Updates aktualisiert werden.
Für solch ein Software-definiertes Fahrzeug (Software-Defined Vehicle, SDV) mit kurzen evolvierenden Entwicklungszyklen und hoher Systemkomplexität erscheint die traditionelle, reaktive Fehlerdiagnose des Fahrzeugs in der Werkstatt kaum noch als zukunftstaugliches Modell.
Ablesbar wird das an Zahlen aus den USA: Dort erfolgten 2024 bereits 46 % aller Rückrufe aufgrund von Softwareproblemen; ein drastischer Anstieg gegenüber nur 14,2 % im Jahr 2023. Insgesamt 13,4 Mio. Fahrzeuge mussten 2024 in den USA allein aufgrund von Softwarefehlern in die Werkstätten gerufen werden – viermal so viele wie im Jahr zuvor. Ein Trend, der sich mit immer mehr Software im Fahrzeug weiter zu verschärfen droht, und der für OEMs und Flottenbetreiber mit erheblichen Kosten und Reputationsverlust verbunden ist. [1]
Drohende »No-Fault-Found«-Epidemie
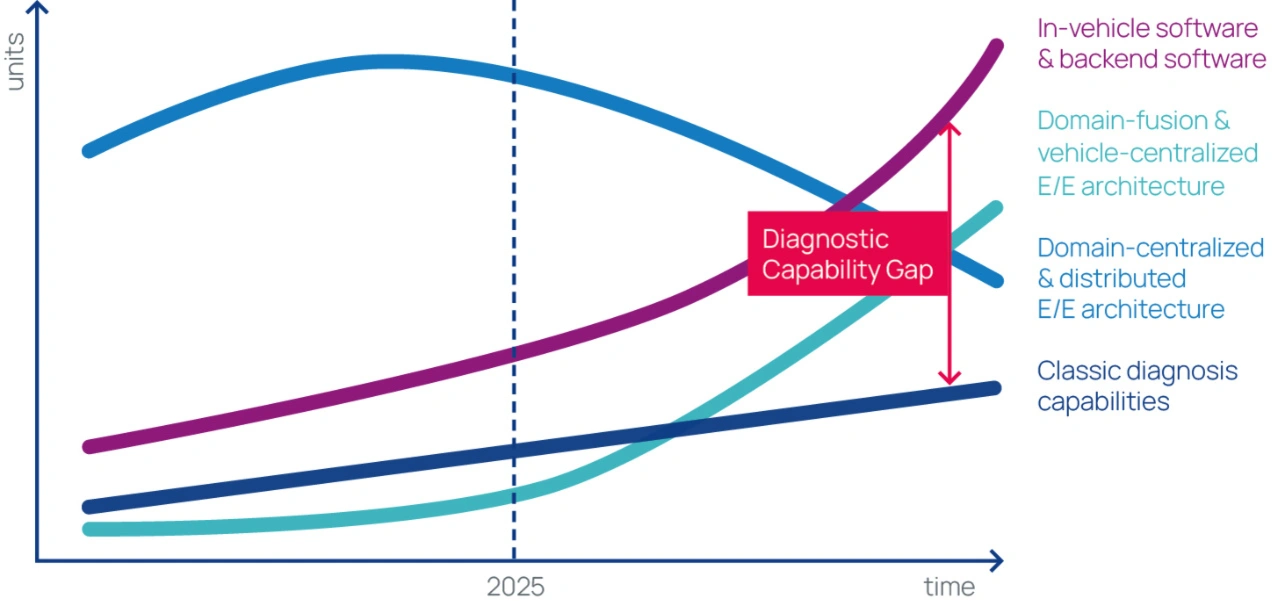
Kurzum: Mit dem SDV stehen Fahrzeugdiagnose und Troubleshooting an einer Bruchkante. Die klassische, DTC-basierte (Diagnostic Trouble Code) Fahrzeugdiagnose, die greifbare Fehler elektromechanischer Fahrzeugtechnik durch standardisierte Routinen und Dokumentationen adressiert, erreicht hier ihre Grenze. Bei drastisch steigendem Softwareanteil und der Entkopplung von Hard- und Software bis hin zur parallelen Ausführung verschiedenster Anwendungen auf HPCs in zentralisierten Architekturen sind Fehler oft nicht mehr auf singuläre Ursachen zurückzuführen, und daher durch DTCs nicht mehr abbildbar. Es entsteht eine strukturelle Kompetenzlücke (Diagnostic Capability Gap), die sich nur mit kontinuierlichem Monitoring der Fahrzeuge und neuartigen Diagnosekonzepten schließen lässt (Bild 1).
Hinzu kommt die »No-Fault-Found«-Problematik (NFF). Diese stellt bereits eine erhebliche Belastung für die OEMs dar – durch kostspielige Werkstattbesuche, unnötigen Austausch funktionsfähiger Hardwarekomponenten in der Garantiezeit und sinkende Kundenzufriedenheit. Gründe sind mangelhafte Diagnosetools oder -daten, unzureichende Informationen über die Diagnosefähigkeiten der Steuergeräte und fundamentale Lücken bei der Analyse komplexer Softwareprobleme. Mit dem Übergang zum SDV droht das NFF-Phänomen geradezu epidemische Ausmaße anzunehmen, sofern es nicht gelingt, neue softwarezentrierte und datengetriebene Diagnosewerkzeuge und Troubleshoot-Prozesse zu etablieren. [2, 3]
Anforderungen für die SDV-Ära
Es gilt also, die traditionelle, auf dem Unified-Diagnostic-Services-Protokoll (UDS) und statischen Fehlercodes basierende Diagnose technologisch so zu erweitern, dass sie der Analyse transienter, softwareinduzierter Fehlfunktionen, wie sie das SDV erfordert, gewachsen ist. Auch müssen OEMs ihre organisatorischen Strukturen und Prozesse anpassen, um eine ganzheitliche Diagnosestrategie zu etablieren. Und sie müssen bei der Erstellung von Diagnoseinhalten agiler und effizienter werden, um mit den schnellen Entwicklungs- und Update-Zyklen von SDVs Schritt zu halten. Gefragt sind neue zukunftssichere Fähigkeiten und Strukturen:
- SOVD & Log-Data-APIs: SOVD (Service-Oriented Vehicle Diagnostics) als neuer ASAM-Standard fürs SDV und dedizierte Log-Data-APIs unterstützen serviceorientierte Architekturen und ermöglichen eine tiefe Systemanalyse über die reine Fehlercode-Abfrage hinaus.
- KI-gestützte Logdatenanalyse: Die schiere Menge an Logdaten im SDV verlangt nach KI-gestützten Cloud-Systemen, die diese Datenmengen korrelieren, Anomalien erkennen und Muster identifizieren, die auf Softwarefehler hindeuten.
- Überwindung von Silos: Die Diagnose bleibt nicht länger isolierter Prozess im After-Sales, sondern muss sich übergreifender Tools und Prozesse bedienen, die einen durchgängigen Diagnosefokus von der Entwicklung über die Produktion bis in den Fahrzeugbetrieb sicherstellen.
- Durchgängige Datenverfügbarkeit: Relevante Diagnoseinformationen, einschließlich der Metadaten über die Diagnosefähigkeiten der Software-Komponenten, müssen der richtigen Person zur richtigen Zeit im Fahrzeuglebenszyklus zur Verfügung stehen – sei es dem Entwickler, dem Produktionstechniker oder dem Service-Mitarbeiter.
- Reduzierung fehlerhafter Diagnosedaten: Nicht synchronisierte, fehlerhafte und nicht ausreichend SDV-gerechte Diagnosedaten (z. B. in ODX-Dateien) verursachen immense Folgekosten. Zentrale Backbone-Architekturen und Data Lakes als »Single Source of Truth« wirken dem entgegen und stellen Datenkonsistenz über alle Bereiche hinweg sicher.
- Offene Standards: Proprietäre Lösungen und »De-facto«-Standards schaffen Abhängigkeiten und erschweren die Interoperabilität. Die konsequente Nutzung offener Standards (z.B. ASAM) und Austauschformate ermöglicht ein flexibles, zukunftssicheres und anbieterunabhängiges Diagnose-Ökosystem.
- Automatisierte Content-Erstellung: Manuelle Prozesse im Authoring sind langsam und fehleranfällig. Hingegen gewährleisten automatisierte, direkt an die Softwareentwicklung gekoppelte Verfahren, dass die Diagnoseinhalte stets mit dem aktuellen Softwarestand des Fahrzeugs synchron sind.
- Cloud-basierte Content-Bereitstellung: Anstatt Diagnosedaten auf lokalen Testern zu speichern, werden sie über die Cloud bereitgestellt, sodass Werkstätten und Ferndiagnose-Systeme jederzeit auf die aktuellsten Daten zugreifen.
Datengetriebene Diagnoseinfrastruktur
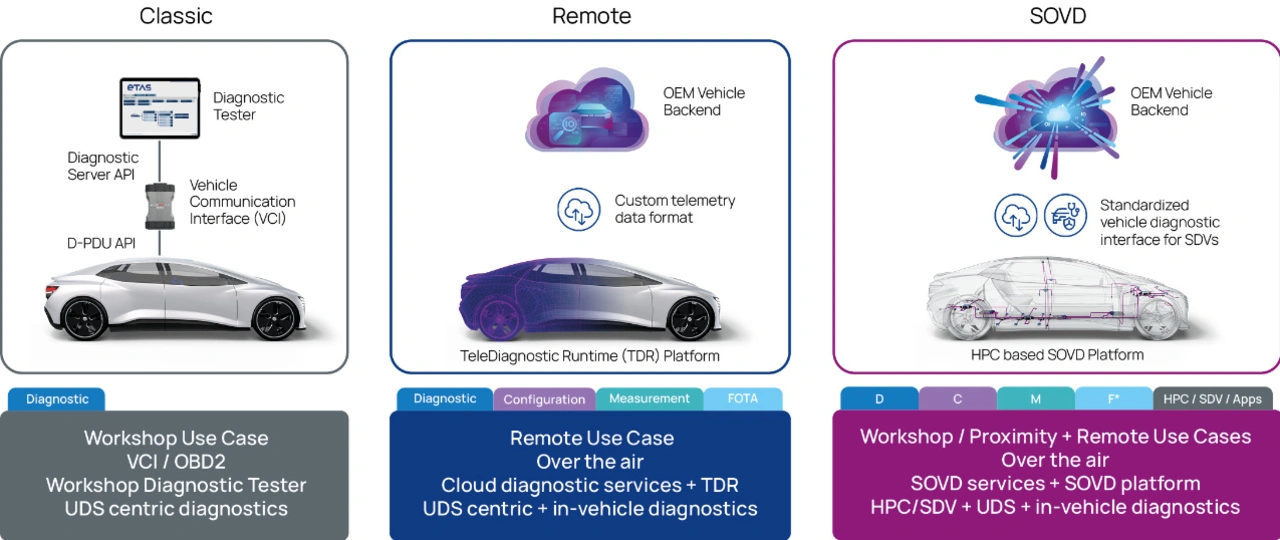
Der Paradigmenwechsel in der Fahrzeugdiagnose erscheint unausweichlich: weg vom reaktiven, fehlerbasierten Ansatz hin zum proaktiven, durchgängigen Diagnosekonzept, das den gesamten Lebenszyklus des Fahrzeugs begleitet – von der Entwicklung über die Produktion und den After-Sales bis hin zum End-of-Life. Entscheidende Voraussetzung hierfür ist die zunehmende Over-the-Air-Fähigkeit (OTA) der Fahrzeuge. Sie erlaubt es, Diagnosedaten aus der Ferne auszulesen und Fehler idealerweise direkt per Fernzugriff zu beheben. Über die reine Remote-Anbindung hinaus erfordert das SDV außerdem eine softwarezentrierte Diagnoseschnittstelle; mit SOVD steht diese heute zur Verfügung (Bild 2).
Fehlersuche und Troubleshooting werden so zu einem proaktiven Prozess mit einer datengetriebene Diagnoseinfrastruktur, die vier essenzielle Bestandteile miteinander verknüpft: Ein Cloud-basiertes, modulares und SOVD-fähiges Diagnosetool, eine intuitive Authoring-Lösung, eine Cloud-basierte Plattform für Simulation und Validierung und kontinuierliches Cloud-basiertes Vehicle Health Monitoring.
1. Modulares, SOVD-fähiges und Cloud-basierte Diagnosetool
Dem modularen, SOVD-fähigen und Cloud-basierten Diagnosetool (ETAS Cloud-Hosted Diagnostics Solution) fällt hierbei eine Schlüsselrolle zu. Es fungiert als clientseitige Software-Applikation, die direkt auf die in der Cloud verwalteten, stets aktuellen Diagnosedaten und -sequenzen zugreift. Wenngleich modular aufgebaut, verfügt das System über eine zentrale Backbone-Architektur, die es dem OEM erlaubt, seine bestehenden Lösungen nahtlos zu integrieren und das Tool an seine spezifischen Geschäftsmodelle anzupassen.
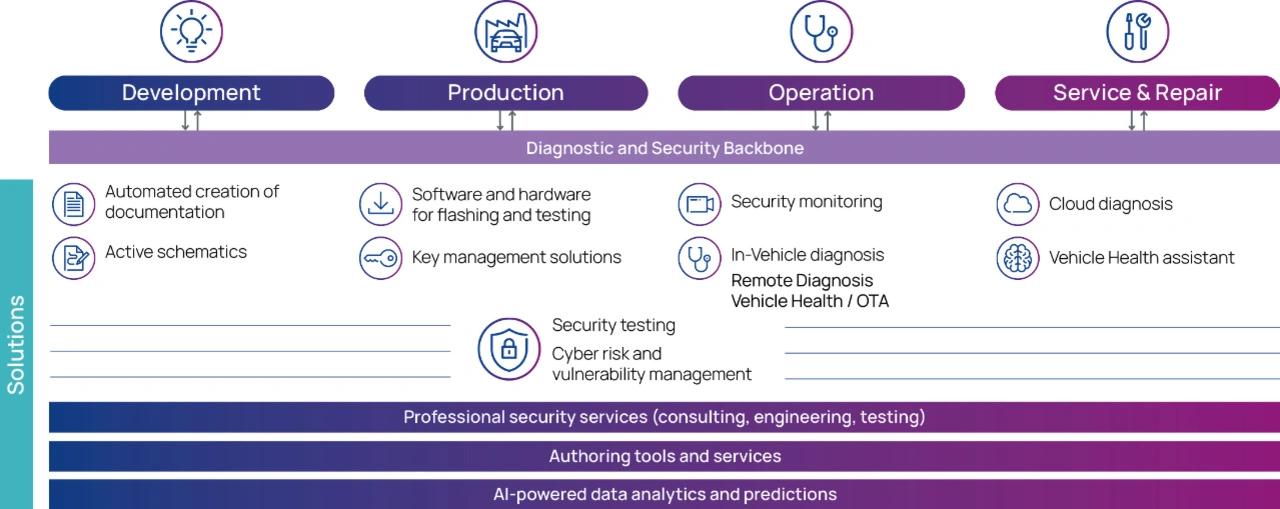
Schlüsselkomponente ist eine portable, ISO-13209-konforme OTX-Runtime, die produktübergreifend einsetzbar ist und die nahtlose Wiederverwendung und Migration von Diagnosesequenzen sicherstellt – und zwar wahlweise onboard im Fahrzeug, auf einem mobilen Client in Fahrzeugnähe (Proximity) oder remote in der Cloud. Diese Portabilität ermöglicht die konsistente Ausführung identischer Diagnoseabläufe über den gesamten Lebenszyklus und verschiedene Fahrzeugarchitekturen hinweg. So entsteht ein skalierbares, zukunftssicheres Framework für ein durchgängiges Vehicle Health Management (Bild 3).
2. Intuitive Authoring-Lösung
Die Effizienz und Qualität zukünftiger Fahrzeugdiagnose hängt darüber hinaus maßgeblich von einer intuitiven Authoring-Lösung ab, die es erlaubt, auch ohne tiefgreifende Software-Engineering-Kenntnisse komplexe Diagnoseabläufe zu erstellen. Realisiert wird solch eine datengesteuerte Lösung durch eine integrierte Entwicklungsumgebung (Integrated Development Environment, IDE), in der Diagnose-Experten des OEMs, Zulieferers oder Dienstleisters flexibel Routinen konfigurieren. Das Fundament hierfür bilden standardkonforme Formate wie ODX und SOVD CDF für die Diagnosefähigkeiten sowie OTX (ISO 13209) für die Testsequenzen. Diese werden durch ein gemeinsames, objektorientiertes Datenmodell und ein erweiterbares UI-Definitions-Framework (UI Composer) zu einem kohärenten System verbunden.
Per Abstraktion und Polymorphismus können OTX-Inhalte so gestaltet werden, dass sie über verschiedene Bereitstellungs-/Laufzeitkontexte und Fahrzeugschnittstellen hinweg wiederverwendbar sind. Dem Sequenz-Autor wird auf diese Weise die durch die verschiedenen Protokolle der Fahrzeugkommunikation bedingte Komplexität abgenommen. Die erstellten Inhalte werden anschließend über moderne CI/CD-Methoden und ein durchgängiges Lifecycle-Management bereitgestellt.
3. Cloud-basierte Simulation und Validierung
Als Unterbau für Entwicklung und Validierung einer dynamischen Diagnoselösung für das SDV dient eine Cloud-basierte Diagnose-Simulationsplattform. Anstatt auf teure und nur begrenzt verfügbare physische Fahrzeuge oder HiL-Systeme angewiesen zu sein, können Diagnoseanwendungen dort in einer virtuellen Umgebung vollständig ohne Hardware ausgeführt werden. Über eine intuitive, Cloud-gehostete Benutzeroberfläche können Entwickler die Kommunikation in Echtzeit bewerten, Off-board-Tools entwickeln, erstellte Diagnoseinhalte (z.B. OTX-Sequenzen) validieren, Fehlersuche betreiben und Schulungen durchführen.
Die Simulationsmodelle lassen sich effizient aus bestehenden Diagnose-Logs (z.B. TRC, LOG) erstellen oder manuell anpassen, um spezifische Fehlerszenarien nachzubilden. Die Kernfunktionalität umfasst ein tiefgreifendes Protokoll- und DTC-Management, das die Emulation realistischen Diagnoseverhaltens auf Basis von ODX-Datenbanken erlaubt. Das Resultat: Entwicklungszyklen werden signifikant verkürzt, Kosten gesenkt und die Qualität der Diagnosesoftware durch frühzeitige, umfassende Tests gesteigert.
4. Cloud-basiertes Vehicle Health Monitoring
Für die Fahrzeuge im Feld wird Cloud-basiertes Vehicle Health Monitoring (ETAS Vehicle Analytics and Intelligence Solution) zum Knotenpunkt für Diagnose und Troubleshooting. Anstatt reaktiv auf statische DTCs zu warten, die oft nur Symptome und keine Ursachen beschreiben, wird damit eine proaktive und ganzheitliche Überwachung der Fahrzeugflotte möglich.
Die Vehicle-Health-Monitoring-Lösung aggregiert und analysiert dabei Over-the-Air und KI-gestützt kontinuierlich Betriebs-, Diagnose- und Software-Logdaten aus den Fahrzeugen. Mittels maschinellem Lernen und Knowledge-Graphen identifiziert sie in den Massendaten komplexe Muster und Korrelationen – und kann so dem Techniker in der Werkstatt eine präzise Fehlerdiagnose und konkrete, datengestützte Handlungsempfehlungen liefern.
Mehr noch: Die per Cloud-basiertem Vehicle Health gewonnenen Erkenntnisse bilden die Basis für eine vorausschauende Wartung (Predictive Maintenance): potenzielle Ausfälle werden identifiziert, bevor sie auftreten, Fehler im Idealfall per FOTA-Update behoben. Die datengetriebene Intelligenz erlaubt es OEMs und Flottenbetreibern, die Effizienz im Service zu steigern und die Fahrzeugverfügbarkeit (Uptime) zu maximieren – und liefert zugleich wertvolle Erkenntnisse für die Verbesserung künftiger Fahrzeuggenerationen.
Fazit: Zukunftsfähige Lösung für das SDV
Das SDV erfordert eine Neuausrichtung der Diagnose. Die reaktive Fehleranalyse in der Werkstatt genügt den dynamischen, vernetzten Systemen nicht mehr. Die Zukunft liegt in einem proaktiven, datengestützten Diagnoseservice über den gesamten Fahrzeuglebenszyklus. Dieser integrierte Ansatz kombiniert agile Erstellung von Diagnoseinhalten, Cloud-basierte Simulation und flexible Ausführung im Feld. Ein intelligentes Vehicle Health Monitoring ermöglicht zudem prädiktive Wartung. Die Dividende für OEMs und Flottenbetreiber kommt in Form effizienter Fehlerbehebung, maximaler Fahrzeugverfügbarkeit und hoher Kundenzufriedenheit.
Literatur
[1] SDV Insider: Automotive‘s Hidden Software Crisis – 2024 Recall Trends Uncovered, unter: https://www.sdvinsider.com/p/the-hidden-automotive-software-crisis
[2] Piotr Sydor, et al: Warranty Impacts from No Fault Found (NFF) and an Impact Avoidance Benchmarking Tool, unter: https://www.researchgate.net/publication/316374140_Warranty_Impacts_from_No_Fault_Found_NFF_and_an_Impact_Avoidance_Benchmarking_Tool
[3] Dawn A. Thomas, et al: The “trouble not identified” phenomenon in automotive electronics, unter: https://www.researchgate.net/publication/223804468_The_trouble_not_identified_phenomenon_in_automotive_electronics

Die Autoren
Guido Rulhof
ist Product Field Manager & Chief Product Owner Vehicle Diagnostics bei ETAS in Stuttgart. In dieser Position ist der Dipl-Ing. (FH) verantwortlich für die Produktstrategie und Entwicklung von Diagnose- und Authoring-Lösungen.

Rhys Evans
befasst sich als Software Technical Lead & Architect speziell mit Cloud-basierten Lösungen für Fahrzeugdiagnose und Authoring bei ETAS in Manchester, UK.
