Betriebssystem für Highend-Roboter
Dr. »Robo« in den OP
Bevor ein Chirurg das erste Mal einen Menschen operieren darf, muss er eine lange Ausbildung durchlaufen, in der er jeden Handgriff trainiert. Mit Robotersystemen lassen sich diese virtuell üben. Aber auch erfahrenen Chirurgen können sie bei der Operation zur Hand gehen. Das Betriebssystem für solche Anwendungen muss extrem robust sein.
Ob es sich um sechs oder sechzehn Bewegungsachsen handelt, ob sich die Achsen schnell oder langsam bewegen – Highend-Robotik-Applikationen leben von ihrem deterministischen Verhalten. Hier ist es absolut notwendig, zu jeder Zeit zu wissen, in welchem Status sich das System gerade befindet.
Das hat einen grundlegenden Einfluss auf die Basis des Systemdesigns, das zu jeder Zeit einen korrekten Ablauf sicherstellen muss. Besonders innovative Ideen kommen derzeit aus dem Bereich Robotereinsatz in Operationssälen. Eine neue Generation von robotergestützten Operationswerkzeugen durchlaufen drei bis fünf Jahre andauernde Tests und Verbesserungen, bevor sie auf den Markt kommen.
In der Zwischenzeit entwickeln Forscher in Laboratorien der Hard- und Softwareentwicklung das technisch Machbare, das schon vorher an virtuellen 3D-Modellen des menschlichen Körpers ausprobiert werden kann – ob nun bei der Behandlung von Organen, Drüsen oder Gewebezellen.
Aus universitären Robotiklaboratorien kommend, könnten diese Entwicklungen Einzug in den Unterrichtsraum finden, wo Medizinstudenten die Möglichkeit bekommen, Operationen oder das Sezieren virtuell zu üben. Dadurch können angehende Chirurgen trainieren und dadurch früher präziser arbeiten.
Vielleicht werden Roboter medizinische Operationen in Zukunft weitestgehend allein unter der Kontrolle von Chirurgen durchführen. Dies hätte die Vorteile einer hochpräzisen, sehr kontinuierlichen Beweglichkeit und der feinen Sensorik der Roboter.
Simulation und Visualisierung
Etwas, das die kommerziell arbeitenden Highend-Roboterdesigner aus der Hochschule übernehmen können, ist der konzeptionelle Ansatz in der Systementwicklung. Es lassen sich viel Zeit sparen und bessere Ergebnisse erzielen, wenn man Software-Simulationswerkzeuge einsetzt, wie zum Beispiel »Simulink« von The MathWorks.
Simulink ermöglicht dem Systemdesigner, ein visuelles Modell des Steuerungsprozesses zu entwickeln, das die Abhängigkeiten zwischen den stimulierenden Eingängen und den Antrieb steuernden Ausgängen über eine Serie von grafischen Symbolen darstellt, die dann durch Signalpfade verbunden sind. Beispielsweise erfordert die komplexe Roboterarmsteuerung bei chirurgischen Anwendungen eine Serie von mathematischen Matrizentransformationen.
Mit Simulink lässt sich eine 6x6-Matrix über ein Symbol transformieren, das intuitiv in einem Steuerungsflussdiagramm platziert wird. Alternativ dazu kann man auch eine C-basierte Bibliotheksroutine nutzen, aber dies sowie das Tuning der Bewegung ist bei weitem nicht so intuitiv und somit weitaus fehlerträchtiger.
Der grafische Ansatz fördert das geordnete Denken und die Anwendung stabiler, zertifizierter Module. Roboterapplikationen simulieren zu können, während das Design immer noch auf der grafischen, konzeptionellen Ebene liegt, spart Zeit im Designprozess und fördert die Betriebssicherheit, da sich undefinierte Systemzustände ausmerzen lassen, bevor der Roboter überhaupt gebaut wird.
Nachdem die Entwickler das grafisch orientierte Modell perfektioniert haben, wird daraus automatisch direkt ausführbarer Code generiert, um den Roboter zu steuern. Eine Firma, die sich speziell dem Thema fortgeschrittener Robotikforschung und der Entwicklung entsprechender Designwerkzeuge verschrieben hat, ist Quanser.
Das Unternehmen stellt Entwicklungssysteme für Laboratorien her, die zum Vermitteln mechatronischer Vorgänge geeignet sind, aber auch fortgeschrittene Robotik-Entwicklungsplattformen für OEMs. Ein Produkt von Quanser ist ein Steuerungs-Softwarepaket namens »QuaRC«, ein Designwerkzeug, mit dem sich ein mathematisches Modell eines Robotersteuerungssystems umgehend per Simulink in ein direkt ausführbares, echtzeitfähiges Steuerungsprogramm überführen lässt.
Weil der von QuaRC erzeugte Programmcode für die Antriebe und Sensorik auf einem Echtzeitbetriebssystem (RTOS) laufen kann, arbeitet die Roboterapplikation in Echtzeit.
Determinismus bringt Sicherheit
Allgemein ist bekannt, dass Echtzeitbetriebssysteme in Applikationen erforderlich sind, die Hochgeschwindigkeits-Bewegungen oder hohe Taktraten haben. Aber warum soll eine echtzeitfähige Plattform für Operationsroboter wichtig sein, die sich doch relativ langsam bewegen?
In einem Wort: Sicherheit! Mehrzweckbetriebssysteme wie »Windows« können nicht verlässlich auf einen Stimulus reagieren, wenn dieser auftritt – nicht einmal, wenn der Prozess relativ langsam abläuft. Die Anforderungen an hohe Präzision in chirurgischen Applikationen bringen ein sehr präzises Positionieren des Gesamtsystems mit sich.
In einem reinen Windows-System können Daten von Encoder-Systemen verloren gehen, während Windows mit der Bearbeitung eines davon völlig unabhängigen Tasks beschäftigt ist. Wenn das passiert, gerät das System in instabiles Verhalten oder weist zumindest inakzeptable Verzögerungen auf, die in einer realen Operationsumgebung untragbar wären.
Mit einer Echtzeitumgebung, welche die Sensorik permanent auswerten kann, gibt es keine verpassten Messwerte, während Windows eigenen Tasks nachgeht. In der Lern- oder Laborumgebung erlaubt der Betrieb mit zwei Betriebssystemen, dass Robotikstudenten einen Motor unter der Kontrolle einer Echtzeitapplikation laufen lassen können, während sie die Steuerungsparameter gleichzeitig in der Simulink-Umgebung unter Windows beeinflussen können.
Quanser hat in der Vergangenheit verschiedene Echtzeitbetriebssysteme verwendet, nun aber die neueste Implementierung ihrer Echtzeit-Engine auf »INtime for Windows« von TenAsys umgestellt, und zwar aus mehreren Gründen.
Jobangebote+ passend zum Thema
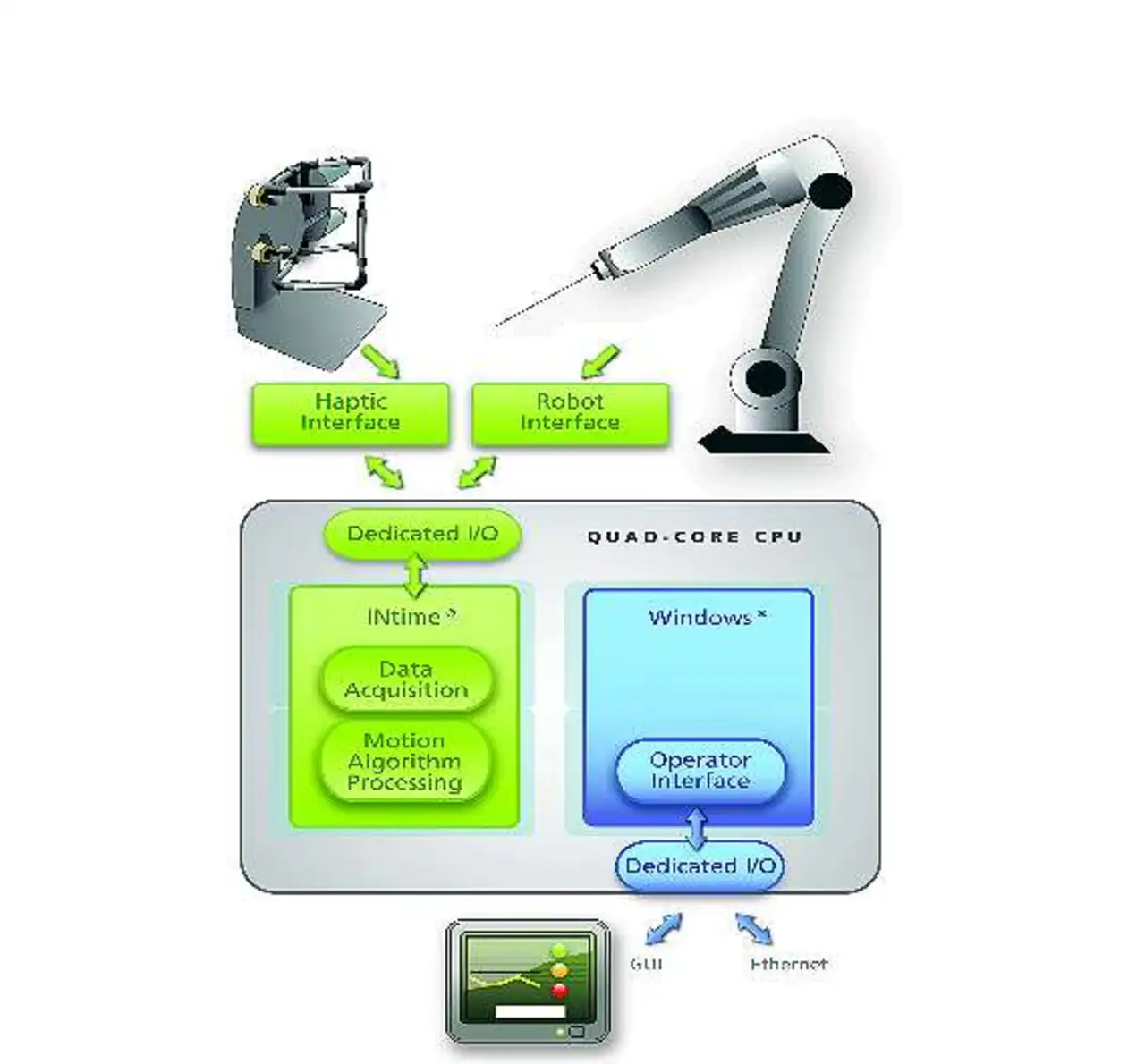
Zum einen, weil INtime schon ursprünglich so entwickelt wurde, dass es parallel zu Windows auf einer Plattform arbeiten kann (Bild 1). Zum anderen, weil das Echtzeitbetriebssystem auch keine Windows-I/O-Treiberstruktur hat.
Stattdessen hat es die vollständige Kontrolle über die Zuteilung seiner I/O-Vorgänge im eigenen Zeitraster und ist komplett unabhängig vom Windows-Task-Scheduling.
Tatsächlich belegt INtime einen oder mehrere CPU-Cores, die vollständig isoliert ihre Echtzeitaufgaben ausführen können.
Das führt dann auch zu deterministischem Rückmeldeverhalten von Messfühlern, die sich direkt an der Robotik-Hardware befinden.
In klassischer Implementierung mussten Ingenieure Systeme mit mehreren Computern designen, um sicherzustellen, dass Echtzeitprozesse völlig unbeeinträchtigt von Windows laufen konnten.
Bei Verwendung der richtigen Betriebssystemsoftware lässt sich nun eine neue Generation von eingebetteten Multifunktionssystemen designen, die zugleich auch noch kosteneffizienter zu implementieren ist.
Ein weiterer Vorteil in der Nutzung von Intime liegt in der Tatsache, dass dieses RTOS »Visual Studio« als Designtools ebenso für die Entwicklung von Echtzeitapplikationen nutzt, wie es auch für die normale Applikationserstellung für Windows der Fall ist.
Durch die Standardisierung auf die PC-Plattform können die Entwickler alle Vorteile der »x86«-Architektur nutzen, die sich durch den rapiden Performance- und Funktionszuwachs dieser Plattformen quasi automatisch ergeben. Das soll die Investitionen längerfristig absichern und der Quanser-Plattform Luft für zukünftiges Wachstum geben.
Haptische Rückmeldung an Chirurgen
In der sich fortentwickelnden Welt der Roboterchirurgie kann der Chirurg im Operationsraum, aber auch weit entfernt davon sein – in jedem Fall wird das Skalpell von einem Roboterarm geführt werden. Das Werkzeug muss sich mit höchster Präzision bewegen, um mit absoluter Sicherheit zu verhindern, einen falschen Schnitt in nächster Nähe von empfindlichen Organen zu setzen.
In solch kritischen Umgebungen hat die absolut ruhige »Hand« des Roboters das höchste Potenzial, den saubersten und präzisesten Schnitt vorzunehmen. Derzeit wird im Feld der Entwicklung von Operationsrobotern stark auf das Thema haptischer Systeme gesetzt (großes Bild).
Die Haptiktechnologie ermöglicht das Anfassen und Fühlen von virtuellen Objekten im dreidimensionalen Raum. Von Menschen bediente haptische Systeme können Roboter mit extremer Präzision führen und zeitgleich einen fühlbaren Eindruck an den Operateur zurückmelden – im Zusammenspiel mit einer grafischen Kontrolle auf dem Operateur-System, die aus der Robotersensorik generiert wird.
Zusätzlich zum erfühlbaren Eindruck des Chirurgen, können Haptiksysteme so programmiert werden, dass es unmöglich wird, mit dem Skalpell in Bereiche zu geraten, wo keinesfalls ein Schnitt erfolgen sollte. Das ist alles in allem ein sehr komplexes Problem, da die Ein-/Ausgabesysteme sechs Freiheitsgrade der Bewegung haben.
Derzeit verwenden Forscher QuaRC, um Algorithmen für ein haptisches Instrument zu entwickeln, welches das chirurgische Skalpell simulieren wird. Das Programm wird finanziert vom National Research Council von Kanada. Das Programm beinhaltet die Entwicklung einer virtuellen 3DUmgebung für neurochirurgische Applikationen.
Aufgrund der sehr realitätsnahen Umgebung kann die Simulation zur Ausbildung von Neurochirurgen verwendet werden. Die robotergestützte Chirurgie ist nur ein Feld, wo die Highend-Robotik Anwendungsgebiete verbessert. Roboter haben das Potenzial, wiederholbare, qualitativ hochwertige Ergebnisse in vielen Anwendungsfeldern zu liefern.
Derartige Applikationen erfolgreich zu entwickeln und dabei ebenfalls die Entwicklungskosten unter Kontrolle zu halten, bedarf einer Umgebung, welche die Simulationen mit dem erforderlichen Determinismus und der entsprechenden Präzisioneffizient zum Leben erwecken kann. QuaRC und INtime kombinieren die Vorteile der Windows-Plattform in der Entwicklung, ohne dafür deterministisches Verhalten zu opfern, das für diese mechatronischen Systeme unabdingbar ist.
Lesen Sie mehr zum Thema
