Sensorfusion als Schlüsseltechnologie
Wie das Fahrzeug »sehen« lernt
Die ADAS-Entwicklung verschiebt sich von Komfortfunktionen hin zu sicherheitskritischen, vernetzten Anwendungen auf Basis komplexer Sensorfusion. Damit rücken funktionale Sicherheit, Systemzuverlässigkeit und robuste Halbleitertechnik in den Fokus – im Zusammenspiel mit moderner Fahrzeugsensorik.
In heutigen ADAS kommen vor allem Radar, LiDAR, Kameras und Ultraschallsensoren zum Einsatz. Frühere Fahrzeuggenerationen nutzten diese Sensoren meist isoliert – typischerweise für Warnhinweise oder leichte Eingriffe wie Notbremsungen oder Spurkorrekturen. Das bot zwar Komfort und einen Zugewinn an Sicherheit, blieb aber in komplexen Verkehrssituationen deutlich hinter dem menschlichen Wahrnehmungsvermögen zurück.
Zukünftige ADAS-Generationen zielen darauf ab, ein ganzheitliches Echtzeitbild der Fahrzeugumgebung zu erzeugen – mit Eigenschaften, die das menschliche Auge unter widrigen Bedingungen sogar übertreffen. Besonders Radar spielt hier seine Stärken aus, etwa bei Dunkelheit, Nebel Lidar oder starkem Regen, während Kameras detaillierte visuelle Informationen liefern und LiDAR präzise Entfernungen und Konturen erfasst (Bild 1).
Durch die kombinierte Nutzung von 3D- und 4D-Radar, Kameras, Lidar und Ultraschall entsteht ein mehrschichtiges Wahrnehmungssystem. Die Daten müssen lokal vorverarbeitet und in einer zentralen Recheneinheit zusammengeführt werden, die gewissermaßen als Gehirn des Fahrzeugs fungiert und die Sensorinformationen interpretiert. Für die zugrunde liegenden Halbleiter bedeutet dies verschärfte Anforderungen hinsichtlich Leistungsfähigkeit, Dauerbelastung, Temperatur- und Störfestigkeit sowie OTA-Update-Fähigkeit.
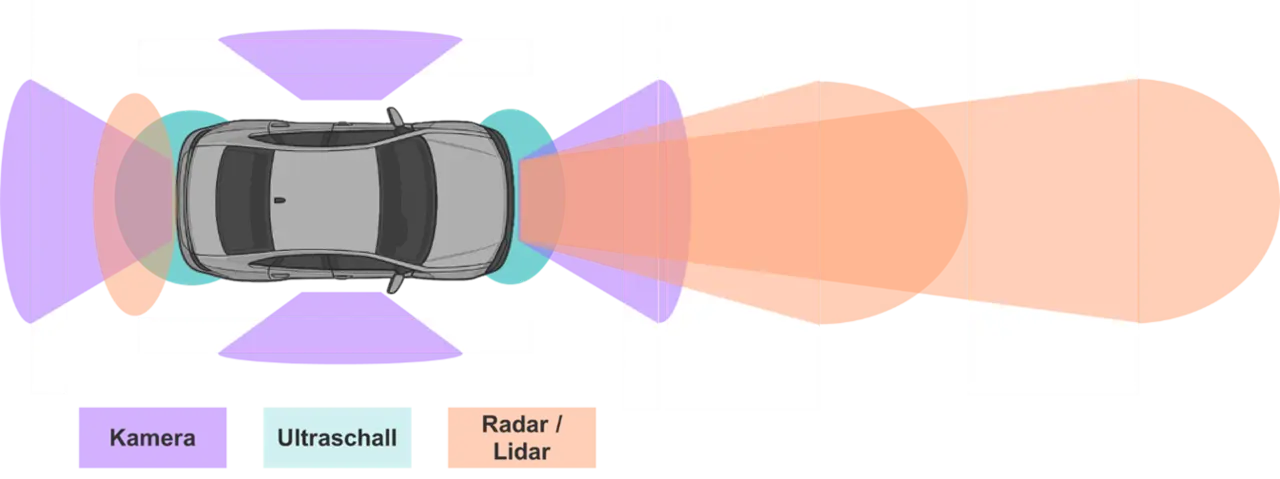
Bild 1. Schematische Darstellung der verschiedenen Sensorarten und ihrer räumlichen Abdeckung.
Warum Sensorfusion zum Schlüssel für ADAS wird
Mit steigenden Autonomiegraden und höheren Sicherheitsanforderungen stoßen Einzelsensorsysteme schnell an Grenzen. Erst die Fusion der Daten unterschiedlicher Sensortypen ermöglicht ein deutlich vollständigeres und konsistenteres Bild der Umgebung (Bild 2). Ein wichtiger Enabler ist die Einführung zonaler Fahrzeugarchitekturen.
Hier übernehmen dedizierte Steuergeräte die Vorverarbeitung der Sensordaten in einzelnen Fahrzeugzonen und leiten die aufbereiteten Informationen über Bussysteme oder perspektivisch über Automotive Ethernet an eine zentrale Rechenplattform weiter. Dort werden die Daten mithilfe von KI-Algorithmen und Machine-Learning-Modellen zusammengeführt, mit Kontext versehen und in Handlungsentscheidungen übersetzt.
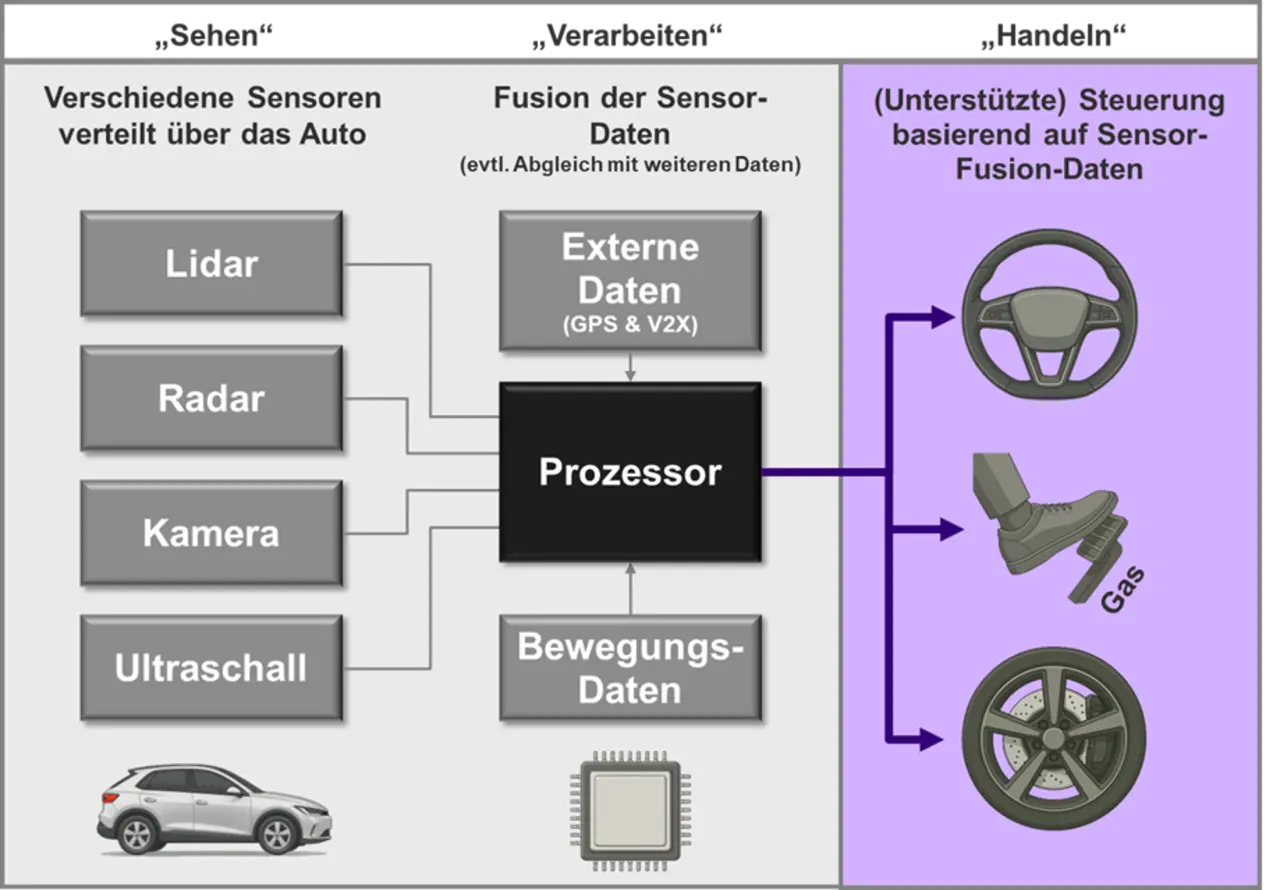
Bild 2. Schematische Darstellung des Datenflusses im Rahmen der Sensorfusion.
Die Vorteile dieser Multisensor-Fusion sind vielfältig:
verbesserte Objekterkennung und -klassifikation durch Verknüpfung von Tiefeninformation (Radar, Lidar) und Bilddetails (Kamera)
Ausgleich individueller Schwächen einzelner Sensortypen, etwa schlechte Lichtverhältnisse bei Kameras oder begrenzte Auflösung bei Radar
höhere räumliche Präzision und bessere Vorhersage von Bewegungen durch 3D- und 4D-Radartechnologien
robuste Redundanz: Fällt ein Sensor aus oder wird durch Blendung bzw. Witterung beeinträchtigt, übernehmen andere Sensoren die Umfeldwahrnehmung
Mit zunehmender Automatisierung müssen die Fusionssysteme allerdings strenge funktionale Sicherheitsnormen wie ISO 26262 erfüllen und in Echtzeit deterministische, fehlertolerante Entscheidungen ermöglichen.
Sensorfusion als Rückgrat softwaredefinierter Fahrzeuge
Softwaredefinierte Fahrzeuge benötigen eine abstrahierte Sicht auf alle Sensoren, die sich unabhängig von konkreter Hardware flexibel nutzen lässt. Die Sensorfusion bildet dafür den Kern: Sie überführt heterogene Sensordaten in ein konsistentes Umfeldmodell, das zentralen Compute-Plattformen zur Verfügung steht.
Auf dieser Basis können Fahrfunktionen als Services umgesetzt, per Software skaliert und über Updates im Feld erweitert werden. Sensorfusion wirkt damit als Bindeglied zwischen physischer Sensorik und einer serviceorientierten SDV-Architektur. Ohne ein robustes, skalierbares Fusions-Framework wäre ein kontinuierlich lernendes, softwaregetriebenes Fahrzeug mit hohem Automatisierungsgrad kaum realisierbar. Gleichzeitig entstehen neue Anforderungen an Bandbreite, Latenz und Datensicherheit – sowohl im Fahrzeug (Backbone, Zonen-ECUs) als auch in der Anbindung an Cloud-Backends für Flotten-Analysen, Updates oder zusätzliche Services.
Technische Hürden: Integration von Analog-, Digital-, HF- und Power-Domänen
Die Umsetzung der beschriebenen Funktionen setzt hochintegrierte Halbleiter voraus, die analoge, digitale, Hochfrequenz- und Leistungsbereiche in einem Chip oder Gehäuse vereinen. Diese Domänen folgen jedoch sehr unterschiedlichen Anforderungen:
Analoge und HF-Schaltungen benötigen hohe Präzision, lineares Verhalten und geringes Rauschen.
Digitale Logik profitiert von aggressiver Skalierung in fortgeschrittenen Knoten.
Leistungselektronik erfordert hohe Spannungsfestigkeit, robuste thermische Eigenschaften und passende Transistorstrukturen.
Ein gutes Beispiel sind mmWave-Radarsysteme für 77 GHz, bei denen die Integration von Antennen in System-in-Package-Lösungen entscheidend für Performance und Baugröße ist. Flip-Chip- und Fan-Out-Wafer-Level-Packages wie eWLB bieten hier Vorteile hinsichtlich Signalintegrität, parasitärer Effekte und Kosten. Gleichzeitig steigen die Anforderungen an Wärmemanagement und Herstellbarkeit, da die Package-Flächen stark zunehmen.
Eine besondere Herausforderung ergibt sich aus der begrenzten Skalierbarkeit analoger Schaltungen in sehr fortgeschrittenen Knoten. Während digitale Blöcke in 7-nm- oder 5-nm-Technologien stark profitieren, lassen sich analoge und HF-Funktionen aufgrund physikalischer Effekte wie Bauteiltoleranzen oder passiver Komponenten nur eingeschränkt mitskalieren. Hinzu kommen zusätzliche Anforderungen durch integrierte Leistungsbausteine mit dickeren Gate-Oxiden und Hochspannungstransistoren, die über klassische CMOS-Prozesse hinausgehen.
Thermisches Management ist dabei ein zentrales Designkriterium: Leistungsstufen erzeugen Verlustwärme, die empfindliche analoge und HF-Pfade beeinflussen kann, insbesondere in kompakten Steuergeräten mit hoher Leistungsdichte.
Zuverlässigkeit im Dauerstress: Wenn die »Badewanne« kleiner wird
Elektromobilität und hochvernetzte ADAS-Funktionen verschieben die Belastungsprofile von Halbleiterbausteinen deutlich. Die klassische Badewannenkurve – frühe Ausfälle, lange stabile Betriebsphase, Verschleiß am Lebensende – bleibt zwar grundsätzlich gültig, verändert sich jedoch in allen drei Phasen.
Drei Aspekte stechen dabei hervor:
deutlich längere effektive Betriebszeiten einzelner Chips durch häufigere Fahrzyklen, permanente Umfeldüberwachung und OTA-Updates
verkürzte intrinsische Lebensdauer bei Technologien im einstelligen Nanometerbereich, verglichen mit ausgereiften Prozessknoten
höhere Sensitivität gegenüber Prozessschwankungen und Defekten, die sich stärker auf Parametertoleranzen und damit auf Zuverlässigkeit auswirken
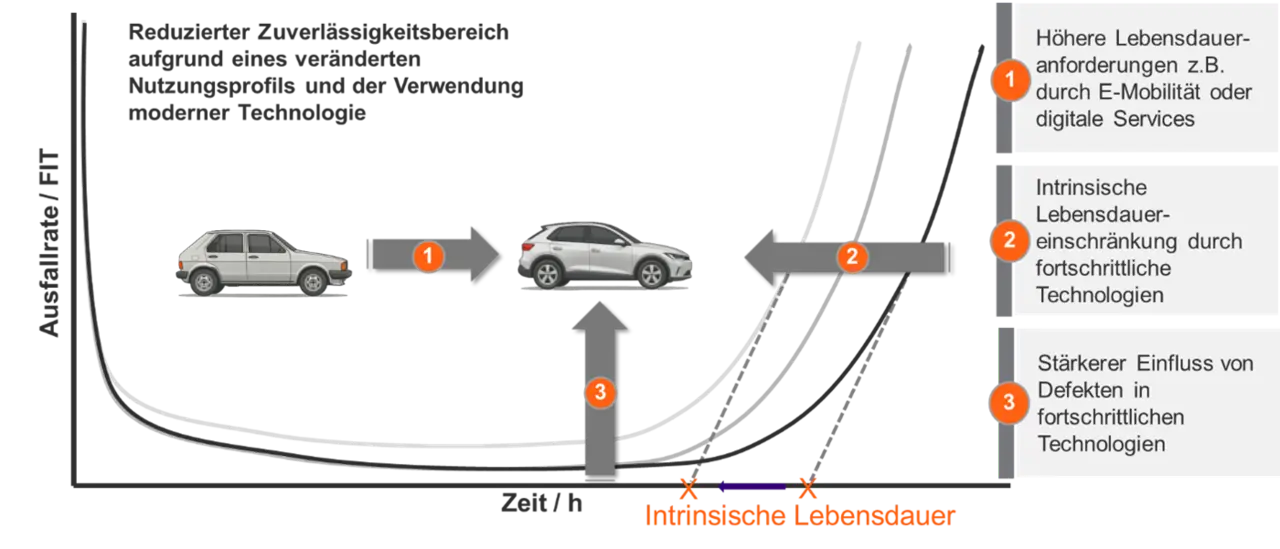
Bild 3. Badewannenkurve: drei zentrale Aspekte, die den Zuverlässigkeitsbereich reduzieren.
Für Automobilanwendungen müssen Halbleiter daher nicht nur Normen wie AEC-Q100 und ISO 26262 erfüllen, sondern in ihrem gesamten Lebenszyklus eine sehr geringe Ausfallrate aufweisen. Dies erhöht den Aufwand für Redundanzkonzepte im Design und die Fertigungskontrolle erheblich (Bild 3).
Fertigung: Prozesskontrolle als Voraussetzung für »Null-Fehler«-Ziele
Die Produktion von Sensoren und weiteren Automotive-ICs ist durch extreme Anforderungen hinsichtlich Performance, Temperatur, Zuverlässigkeit und Langzeitstabilität gekennzeichnet. Entsprechend hoch sind die Ansprüche an Prozessentwicklung, -führung und Test. Wesentliche Erfolgsfaktoren sind:
stabile Prozessfenster über viele Fertigungsstufen und Lots hinweg, um die Parametervariabilität eng zu halten
robuste Packaging-Technologien, die mechanische und thermische Belastungen über ein weites Anforderungsprofil tolerieren
umfassende Testabdeckung sowie präventive Analysen, um frühe Ausfälle zu erkennen und zu eliminieren
Die Ausbeute dient dabei nicht nur als Produktionskennzahl, sondern auch als Indikator für die langfristige Zuverlässigkeit der Technologie. Hohe Linien- und Produktausbeuten erfordern streng überwachte Prozessparameter, kritische Dimensionen sowie geringe Defektdichten, unterstützt durch datengetriebene Prozessüberwachung und kontinuierliche Verbesserungsprogramme (Bild 4).

Bild 4. Line-of-Defense- (LoD-)Konzept zur Kontrolle von modernen Halbleiterherstellungsprozessen.
Branchenstrukturen im Wandel: Vom Komponentenlieferanten zur Plattform
Neben den technischen Aspekten verändert Sensorfusion auch die Wertschöpfungsketten in der Automobilindustrie. Traditionell liefern verschiedene Zulieferer proprietäre Sensor- und Rechenmodule, was Integration, Schnittstellenmanagement und Updatefähigkeit erschwert.
Mit der Verlagerung hin zu zentralen Compute-Plattformen und serviceorientierter Software-Architektur entstehen neue Rollenbilder:
OEMs benötigen stärker integrierte, skalierbare Plattformen statt isolierter Komponenten.
Halbleiterhersteller rücken näher an Systemarchitektur und Softwareentwicklung heran.
Ökosystem-Partnerschaften und Standardisierung gewinnen an Bedeutung, um Komplexität beherrschbar zu halten und Time-to-Market-Ziele zu erreichen.
Alte Geschäftsmodelle geraten dadurch unter Druck, während neue Kooperationsformen entstehen – etwa rund um gemeinsam entwickelte Plattformen, Referenzdesigns und die Verwendung von Plattformtechnologien.
Ausblick: Auf dem Weg zum »Menschen auf Rädern«
Die Verschmelzung von Sensoren, Rechenleistung und Software lässt das Fahrzeug zu einem wahrnehmenden System werden, das seine Umgebung ähnlich umfassend interpretiert wie ein Mensch – und in bestimmten Situationen sogar schneller und robuster reagiert. Sensorfusion ist dafür der zentrale Baustein: Sie ermöglicht höhere Autonomiegrade, steigert die Sicherheit und macht softwaregetriebene Fahrfunktionen flexibel update- und upgrade-fähig.
Gleichzeitig steigen die Anforderungen an Halbleitertechnologien, Systemarchitekturen, Fertigung und Ökosystem-Kollaboration. Wer diese Herausforderungen beherrscht, schafft die Basis dafür, dass das Fahrzeug der Zukunft nicht nur als »Smartphone auf Rädern«, sondern gewissermaßen als »Mensch auf Rädern« agiert – mit umfassender Wahrnehmung, intelligenter Entscheidungslogik und hoher funktionaler Sicherheit.
Der Autor
Dr. Oliver Aubel
ist Corporate Lead Automotive Solutions bei GlobalFoundries.
