Autonomes Fahren effizient getestet
Szenario-basiertes Testen mit KI und digitalem Zwilling
Die Funktionalität automatisierter und autonomer Fahrzeuge muss heute nicht mehr allein in der physikalischen Welt getestet werden. Der folgende Beitrag zeigt, wie KI und digitaler Zwilling das Automotive Engineering mit Datensätzen beim Szenario-basierten Testen unterstützen.
Autonome Fahrzeuge sollen Passagiere oder Ladung im fließenden Verkehr sicher ans Ziel bringen und dabei regelgerechtes Fahrverhalten zeigen (Bild 1). Dazu müssen sie im Wesentlichen die Verkehrssituation per Sensorik wahrnehmen (1), die Situation über Analysemethoden erkennen (2), erforderliche Aktionen planen (3), sowie die Aktionen per Aktuatoren im Fahrzeug umsetzen (4). Diese perzeptiven und steuernden Funktionen bestimmen das Agieren eines autonomen Fahrzeugs in unterschiedlichen Verkehrssituationen.
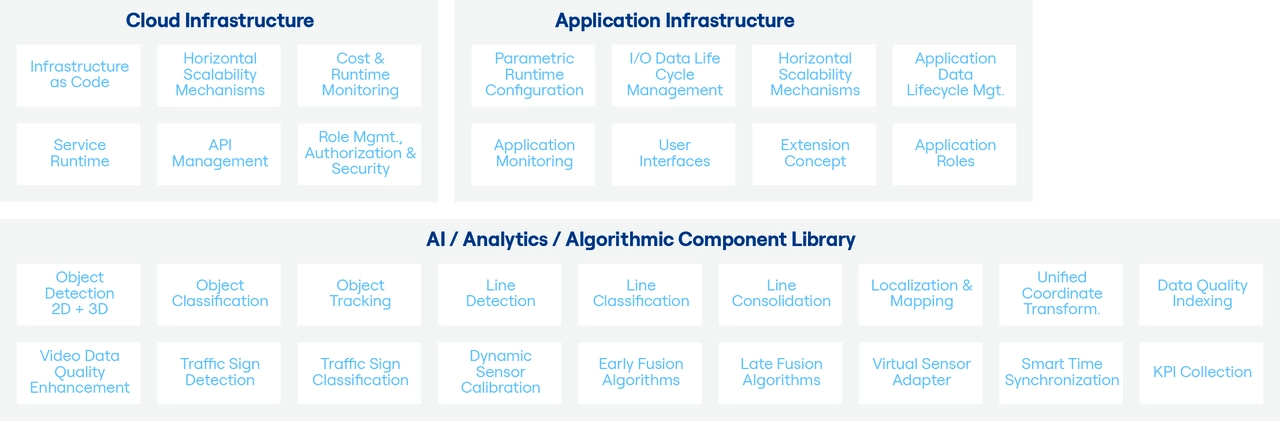
Bild 1. Perzeption und Steuerung autonomer Fahrzeuge im Überblick.
Die Perzeption eines Fahrzeugs wird dabei durch die Vielzahl von Sensoren umgesetzt, darunter Kameras, Lidar-Sensoren und Radar, die die Fahrzeugumgebung erfassen. Diese IoT-Sensorik wird durch ergänzende Informationen aus anderen Quellen (»virtuelle Sensoren«) ergänzt – typischerweise aktuelle Wetter- und Verkehrsdaten oder hochgenaue Karten. Diese sensorischen Inputs werden analysiert, um die aktuelle Fahrzeugsituation zu »verstehen« und formalisiert zu beschreiben. Ein KI-basierter Planner berechnet dann das bestmögliche Verhalten des Fahrzeugs, was schließlich durch Steuerungseinheiten sowie entsprechende Aktuatoren zum Beispiel in Lenkbewegungen, Beschleunigung oder Verzögerung umgesetzt wird. Die Herausforderung für das Automotive Engineering besteht hier darin, ein optimales Zusammenspiel von mechanischer, elektronischer und software-gesteuerter Fahrzeugtechnik zu finden, das die Sicherheit im Straßenverkehr nicht nur gewährleistet, sondern durch den Ausschluss »vermeidbarer« Fehler idealerweise deutlich erhöht.
Autonome Fahrsysteme virtuell testen und optimieren
Autonome Fahrfunktionen – von einzelnen Assistenzsystemen bis hin zu einer vollständigen autonomen Steuerung – müssen umfassend getestet werden, um sicherzustellen, dass sie wie gewünscht arbeiten. Für ein optimales Zusammenspiel auf den verschiedenen Ebenen der Fahrzeugtechnik muss das Engineering passende Testszenarien und -reihen mit aufgabenspezifischen Testkatalogen aufsetzen, die die Auswirkungen unterschiedlicher Einstellungen verschiedener Parameter auf ein betrachtetes Szenario erkennbar machen.
Was früher unter hohem Aufwand vollständig in der physischen Welt getestet werden musste, lässt sich heute mit KI und digitalem Zwilling in wachsendem Umfang in der virtuellen Welt erledigen: Statt viele Zyklen solcher Engineering-Testreihen aufwendig und mit einer Zykluszeit von Monaten mit physischer Fahrzeugtechnik in realen Verkehrssituationen »abfahren« zu müssen, lassen sich dazu heute digitale Zwillinge der gewünschten Szenarien nutzen, die als digitales Abbild das Funktionieren autonomer Fahrsysteme in einem betrachteten Kontext simulieren und mit hoher Flexibilität variieren lassen.
Testplattform mit KI und Rechen-Power in der Cloud
Erste wichtige Voraussetzung für die KI-basierte Simulation komplexer Szenarien mit digitalen Zwillingen ist eine leistungsfähige IT-Plattform, die für die komplexen Berechnungen Computing-Kapazitäten für Datenmengen im Terra- bis Petabyte-Bereich bereitstellen kann. Hier lassen sich sinnvoll projektbezogen Cloud-Kapazitäten nutzen, weil sie je nach Anforderung flexibel skaliert werden können. Zu einer solchen Engineering Plattform gehört außerdem eine Bibliothek mit kontextbezogenen, spezialisierten KI-Komponenten, die zum Beispiel die Algorithmen für die Erkennung und Klassifizierung von Fahrspuren, Objekten im Straßenverkehr oder Verkehrsschildern enthalten. Eine konfigurierbare Applikationsarchitektur sorgt schließlich dafür, dass die erforderlichen Computing-Ressourcen flexibel eingesetzt und Engineering-Prozesse optimal unterstützt werden. Auf Basis einer solchen technologischen Plattform, wie sie beispielsweise das Unternehmen BTC Business Technology Consulting in der vergangenen Dekade entwickelt, produktiv eingesetzt und kontinuierlich optimiert hat, lassen sich intelligente ADAS-Funktionen oder ganze autonome Fahrsysteme systematisch testen und Engineering-Prozesse von Automobilherstellern und Zulieferern KI-basiert unterstützen (Bild 2).
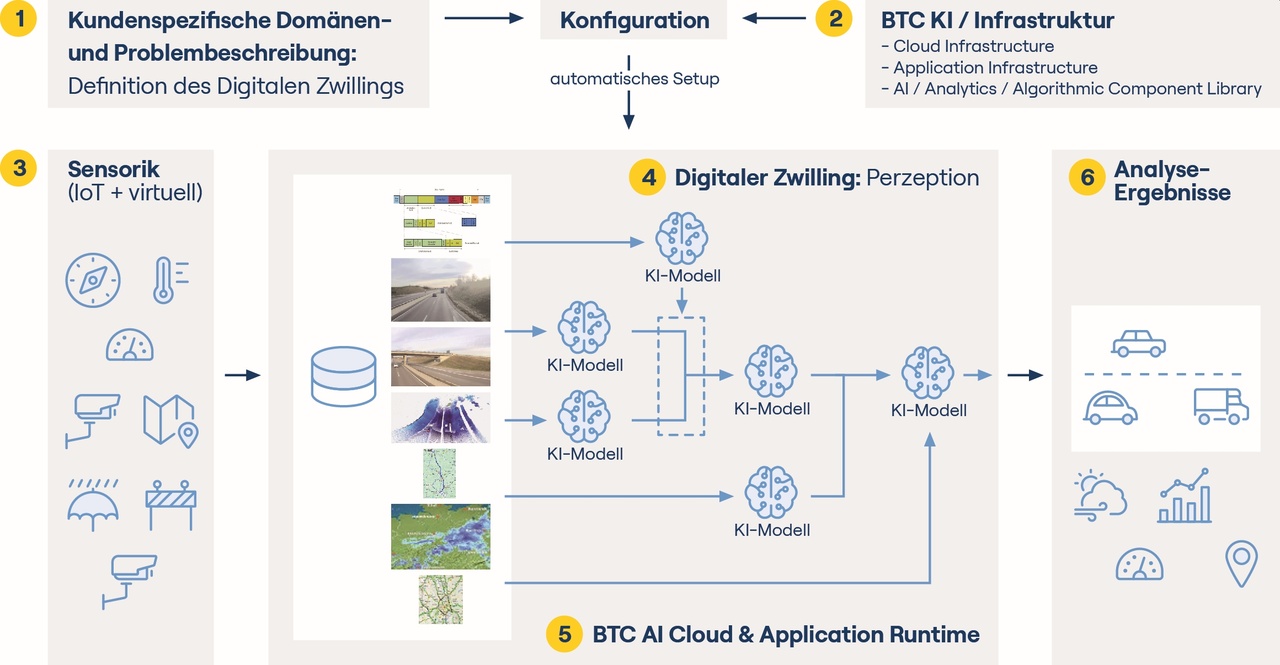
Bild 2. Architektur einer Engineering-Testplattform für autonomes Fahren.
Digitaler Zwilling und KI: Gemeinsam stark für Szenario-basiertes Testen
Folgendes Beispiel zeigt, wie das Testen anhand eines digitalen Zwillings mithilfe einer KI-basierten Testplattform erfolgen kann. Im konkreten Beispiel geht es um eine perzeptive Aufgabe: ein Szenario, in dem getestet wird, ob sich ein autonomes Fahrzeug in einer Innenstadt vor einem Zebrastreifen richtig verhält, also Fußgänger erkennt und kontrolliert mit passendem Abstand anhält. Die Wahrnehmung und Erkennung dieser Umgebungssituation wird – schematisiert vereinfacht – in sechs Schritten mithilfe von digitalem Zwilling und KI durchgespielt (Bild 3).
Zunächst wird die Problembeschreibung und Fragestellung für das Engineering identifiziert und erfasst (1): Welches Szenario soll getestet werden? Als technologische Basis für den Test dient die cloud-basierte Engineering-Plattform mit den genannten Komponenten und Fähigkeiten. Hier werden die gewünschten Parameter für das zu untersuchende Basis-Szenario festgehalten (2). Als Datenquellen stehen dem autonomen Fahrzeug im Beispielfall für die Umgebungswahrnehmung IoT-basierte Sensorik (3) zur Verfügung – das könnten beispielsweise drei Kameras und ein Lidar-Sensor sein, die an bestimmten Positionen und Winkeln am Fahrzeug befestigt sind und entsprechende Datenströme als Input liefern.
Außerdem dienen Geschwindigkeitsdaten des Fahrzeugs sowie externe Informationen zu Wetter, Verkehrssituation sowie Landkartendaten als weitere Informationen für die Perzeption. Um einen digitalen Zwilling (4) für dieses Szenario zu erstellen, werden aus der KI-Bibliothek der Testplattform die benötigten Algorithmen und Komponenten ausgewählt, angepasst, gegebenenfalls spezifisch nachtrainiert bzw. optimiert und in die Konfiguration eingespielt.
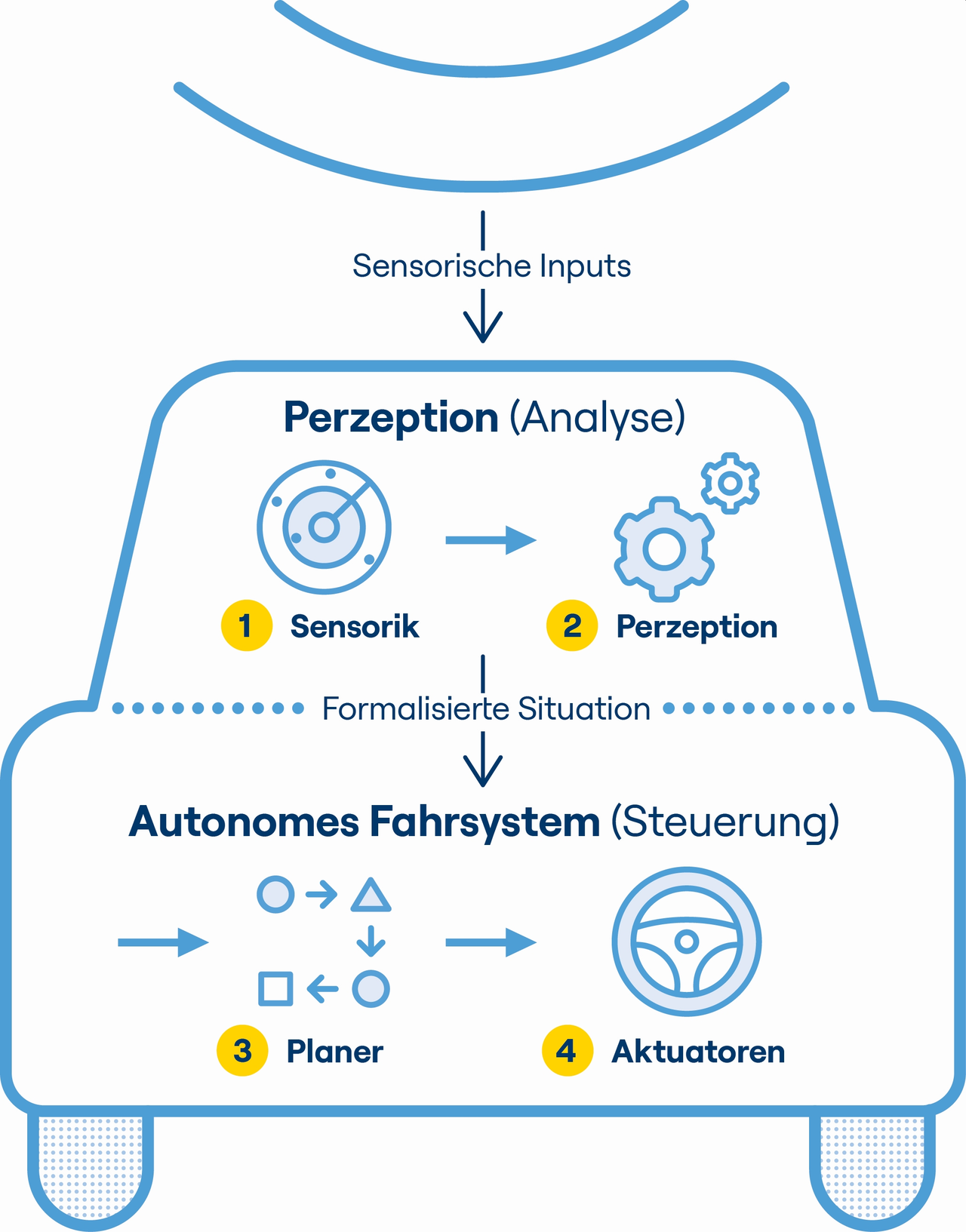
Bild 3. KI-basierte Testplattform: Perzeptions-Szenarien im Test.
Sollten zusätzliche Komponenten mit weiteren Spezialfähigkeiten erforderlich werden, kann die vorhandene KI-Bibliothek entsprechend ergänzt oder erweitert werden. Typische Komponentenfunktionen sind dabei unter anderem Adapter für Kamera- und Lidar-Input, AI-Komponenten zur Erkennung von Objekten, die Beschreibungen der Objektklassen Zebrastreifen, Fußgänger, andere Fahrzeuge etc. Ist die Konfiguration aus Komponenten und dem zwischen ihnen erforderlichen Datenfluss vollständig, wird daraus per Knopfdruck in einem automatischen Setup der digitale Zwilling für dieses Szenario (5) erzeugt und in die BTC AI Cloud & Application Runtime zur Ausführung eingespielt. Der so erstellte digitale Zwilling ist dann bereit, die Eingangsdaten aufzunehmen, bei denen es sich um echte Videodaten von Testfahrten, um synthetische, selbst mit KI erstellte Video-Streams oder auch um zusätzliche CAN-Bus-Daten handeln kann. Die genutzten Eingangsdaten werden nun mithilfe der ausgewählten KI-Komponenten analysiert, um als Ergebnis eine Beschreibung der aktuellen Situation zu berechnen (6) – diese wird dann mit den gewünschten KPIs wie eigene Position, erkannte Verkehrsteilnehmer und Geschwindigkeit ausgegeben. Diese Situationsbeschreibung zeigt dann, was vom System gut erkannt wurde, oder wo etwas korrigiert werden muss und wo gegebenenfalls verbessert werden kann.
Effizientes Optimieren autonomer Fahrfunktionen
Mit dem einmal erstellten digitalen Zwilling lassen sich im Rahmen einer geplanten Testreihe verschiedenste Parameter verändern, um zu analysieren, wie sich diese Veränderungen im Testszenario auswirken und wie man das System weiter optimieren kann. Auf diese Weise können Testreihen systematisch und effizient virtuell durchgeführt werden. Vorhandene Datenbestände lassen sich optimal nutzen und durch synthetische Daten aufwerten. Teure und vor allem langwierige physikalische Experimente und Testzyklen können so deutlich reduziert werden.
Die Ergebnisse lassen sich entweder in physikalische Fahrzeugkonfiguration übernehmen oder in weiteren Szenarien zu (noch) komplexen Simulationen zusammenfügen. Eine leistungsfähige, KI-basierte, algorithmisch hochentwickelte Testplattform, die aktuelle IT-Infrastruktur in der Cloud flexibel nutzbar macht, unterstützt das Automotive Engineering und macht das Testen, Weiterentwickeln und Optimieren autonomer Fahrfunktionen mithilfe eines digitalen Zwillings äußerst effizient.
Der Autor

Dr. Ulrich Keil, BTC.
Dr. Ulrich Keil
ist Senior Management Berater KI & Cyber Security bei BTC.
