Digital Power
Erfüllte Verheißungen
Fortsetzung des Artikels von Teil 1
Erfüllte Verheißungen
Powermanagement
In einem typischen analogen Netzteil bewerkstelligt die organisierende MCU die Anforderungen an das Powermanagement (Bild 2, links).
Dieser Baustein schickt die lokalen Systemparameter an einen Mastercontroller oder Datenlogger, der meist außerhalb der Stromversorgung sitzt und wiederum zusätzliche Messschaltungen nutzt, um die erforderlichen Daten zu erfassen, und diese wieder an die Housekeeping-MCU zurückschickt.
In einigen Anwendungen kann auch ein abgesetztes System Befehle zur Steuerung der lokalen Leistungswandler aussenden.
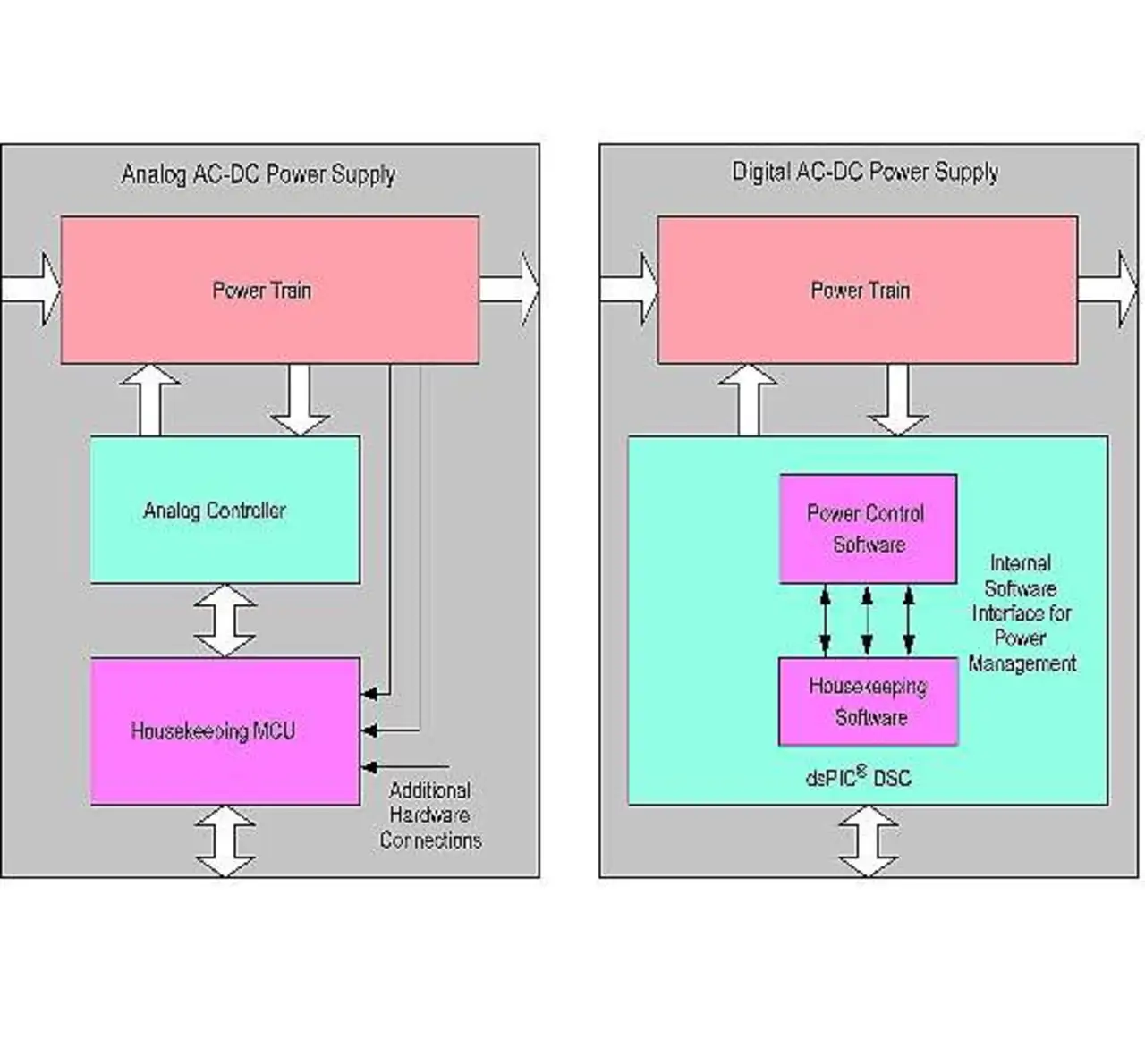
Diese Konfiguration benötigt zusätzliche Hardware-Schnittstellen zwischen der Verwaltungs-MCU und den Leistungswandlern, was wiederum Mehraufwand und Kosten verursacht.
Ein digitales Netzteil verzichtet auf diese zusätzlichen Schaltkreise, da der DSC alle Systemparameter messen, in seinem Speicher ablegen und an das abgesetzte System schicken kann (Bild 2, rechts).
Hierfür steht auf dem Chip die Kommunikationsperipherie in Form von SPI, I²C, UART oder CAN bereit. Alle Modifikationen im Systemablauf lassen sich durch simple Software-Routinen ohne zusätzliche Hardware vornehmen.
Auch reduziert das digitale Netzteil die Gesamtkosten des Systems, indem redundante Schaltkreise entfallen.
Beim Beispiel des zweistufigen Netzteils misst die erste Stufe die Ausgangsspannung für die Regelung. Da diese Spannung auch am Eingang der zweiten Stufe liegt, werden dieselben Daten auch hier ausgewertet und entweder für Vorwärtskopplung (feed forward) oder den Unter- oder Überspannungsschutz am Eingang genutzt.
Ein einziger DSC eliminiert redundante Messungen und bietet intern alle Optionen für die unterschiedlichen Regel- oder Schutzfunktionen. Zudem hilft der Baustein dem System dabei, wesentlich schneller und effizienter auf Fehlerzustände zu reagieren als dies analoge Regler überhaupt können.
Wenn zum Beispiel in einem zweistufigen analogen Netzteil ein Fehler im Abwärtswandler auftritt, wird der vordere PFC-Hochsetzsteller den Fehler nicht bemerken bis dieser Zustand an den PFC-Regler gemeldet wurde. Ein digitaler Regler kann Fehlfunktionen im gesamten System wahrnehmen und deshalb fast unmittelbar auf einen Fehler reagieren, egal wo er aufgetreten ist.
Softstart und Sequencing
Beim Einschalten sind die verschiedenen Speicherkomponenten des Netzteils (Kondensatoren und Drosseln) zunächst energiefrei. Um den hohen Einschaltstrom (inrush current) und die damit verbundene Belastung der Systemkomponenten zu vermeiden, wird in allen Stufen des Netzteils ein Softstart implementiert.
Viele, aber nicht alle, analogen Regler verfügen über einen integrierten Softstart. Analoge Regler sind nur bedingt flexibel in der Einstellung der Dauer des Softstarts und der Hochlaufverzögerung und benötigen zusätzliche Schaltungsmaßnahmen. In mehrstufigen Netzteilen folgen die Ausgänge zudem einem definierten Ablauf, da einige Ausgänge von anderen abhängen.
Dies kann durch einen eigenen Chip erfolgen oder die Housekeeping-MCU mit zusätzlichen Schaltungen. Bei einem digitalen Netzteil können zusätzliche Hardwaremaßnahmen für Softstart-Routinen und Ablaufsteuerung für die unterschiedlichen Strategien entfallen, da sie alle als ein Teil der Reglersoftware implementiert sind.
Eine Softstart-Routine lässt sich für jede Stufe des Netzteils implementieren, in Kombination mit konfigurierbarer Dauer und Verzögerung. Eine typische Softstart-Routine zeigt der C-Code-Ausschnitt in Listing 1.

Innerhalb des Codes wird die Softstart-Routine unmittelbar nach der Initialisierung des DSCs aufgerufen.
- Erfüllte Verheißungen
- Erfüllte Verheißungen
- Erfüllte Verheißungen
Lesen Sie mehr zum Thema
