Wheel hub motors
The powertrain of e-vehicles rethought
Wheel hub motors are increasingly being used in electric vehicles. This allows considerable space savings to be made, for example by eliminating the need for a differential and drive shafts. This article describes the development of wheel hub motors and some aspects of design integration.
Automotive development in the automotive sector has always been a rather conservative, evolutionary process. Despite the profound technological shift toward electromobility, designers are playing it "safe" as much as possible, trying to make the basic layout, shape and driving feel of an electric vehicle as similar as possible to a conventional vehicle with an internal combustion engine.
As a result, electric vehicle designs to date have tended to replace the gasoline or diesel engine with a single electric motor coupled via a conventional arrangement of drive shafts, differential gears and, in the case of front-wheel drive, constant velocity joints. Designs with multiple motors also exist, but these are usually permanently installed in the vehicle chassis and mechanically coupled to the wheels.
The idea dates back to the 19th century
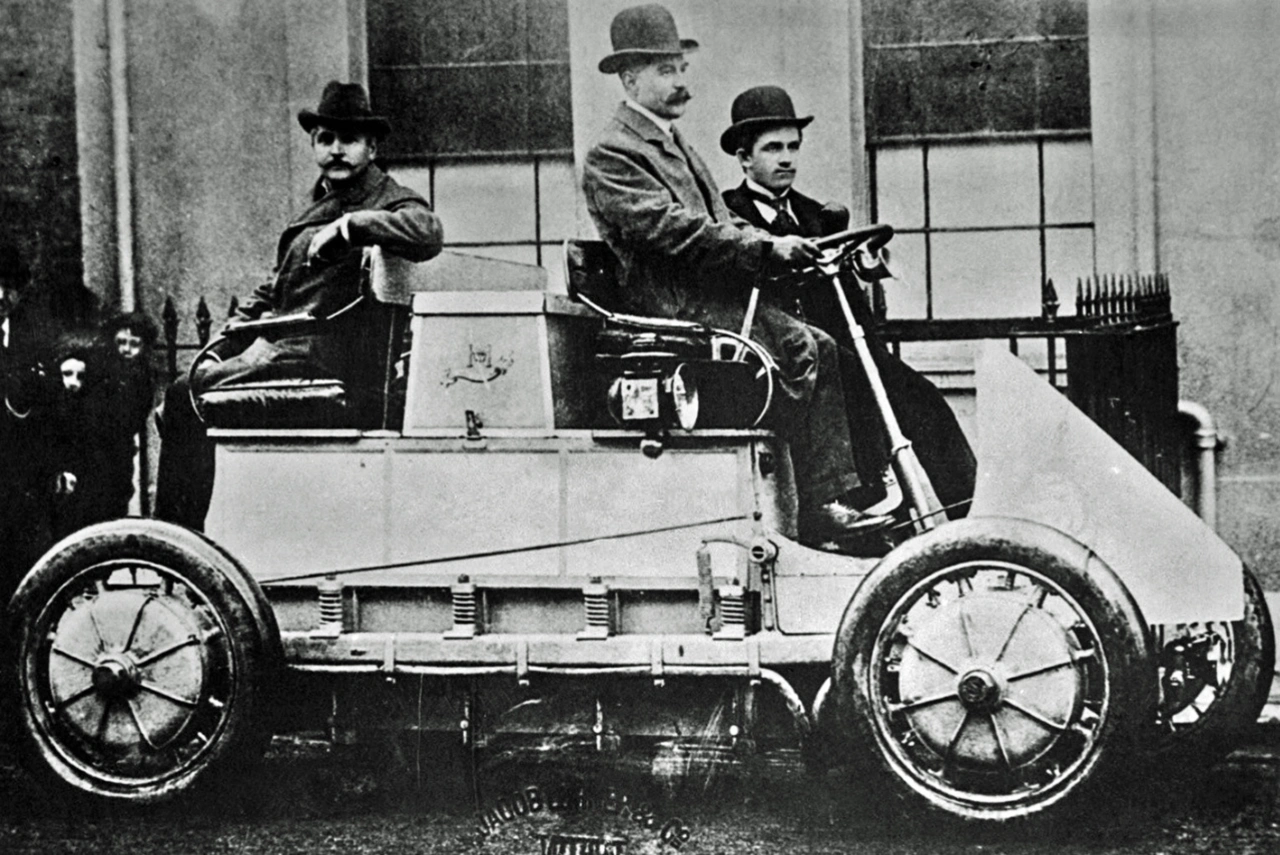
At the end of the 19th century, Ferdinand Porsche had a good idea: He developed a »horseless carriage« in the form of the Lohner-Porsche electric car (Figure 1), in which an electric motor was installed in each wheel hub and fed by batteries, which in turn were charged by a built-in gasoline engine. Motor control was rudimentary, but eliminated the power losses of the conventional powertrain and transmission of an internal combustion engine. Steering was enormously sluggish, power was low, and with a weight of one and a half tons, range was short. Thus the car disappeared into history as an automotive curiosity.
However, the idea of wheel-hub electric motors has come up again and again, for example in the Lunar Roving Vehicle (LRV) in the early 1970s, but more recently in practical implementations for road-going cars. This technology is also known as active-wheel technology. Michelin pioneered this technology in the late 2000s [1], and active development has continued to this day with concept demonstrators such as the Nissan BladeGlider [2] showing that it can become a reality.
The advantages of wheel hub motors
A system with up to four hub motors may seem more complicated than a single chassis-mounted unit, but when the system is considered as a whole, there are real advantages: Driving the wheels directly eliminates the drivetrain losses of a centralized electric motor, eliminates the need for a mechanical differential, and reduces overall weight. According to one company working on the development of hub drive systems, the overall weight and energy savings can result in a range improvement of more than 30%, depending on battery size and drive cycle [3].
Wheel hub motors can be very compact, and along with the elimination of drive shafts and differential, the vehicle interior becomes potentially larger and more flexible. In addition, if the drive electronics are integrated, wiring is simplified - only a single power supply line and return instead of at least three power supply cables to each motor that would be required if the drive inverter were mounted in the chassis. Routing the frequency converter to each motor in the hub also reduces electromagnetic emissions from the cables.
A major advantage is the possibility of improving driving dynamics and safety. In a conventional internal combustion engine, complex mechanical arrangements are used to provide antilock braking and traction control, and to prevent wheel slip on poor surfaces and when cornering. Differential gearing allows the wheels to turn at different speeds when cornering to reduce tire wear and improve handling, with some advanced systems such as limited slip used for off-road applications.
These systems can be very complex and include electronics that sense both required and actual wheel speed and torque, but ultimately the only control available is to increase or decrease overall engine power or slow down individual wheels.
With a single fixed electric motor, all this mechanical and electrical complexity must remain, although unlike an internal combustion engine, the motor can reverse its torque for overall braking.
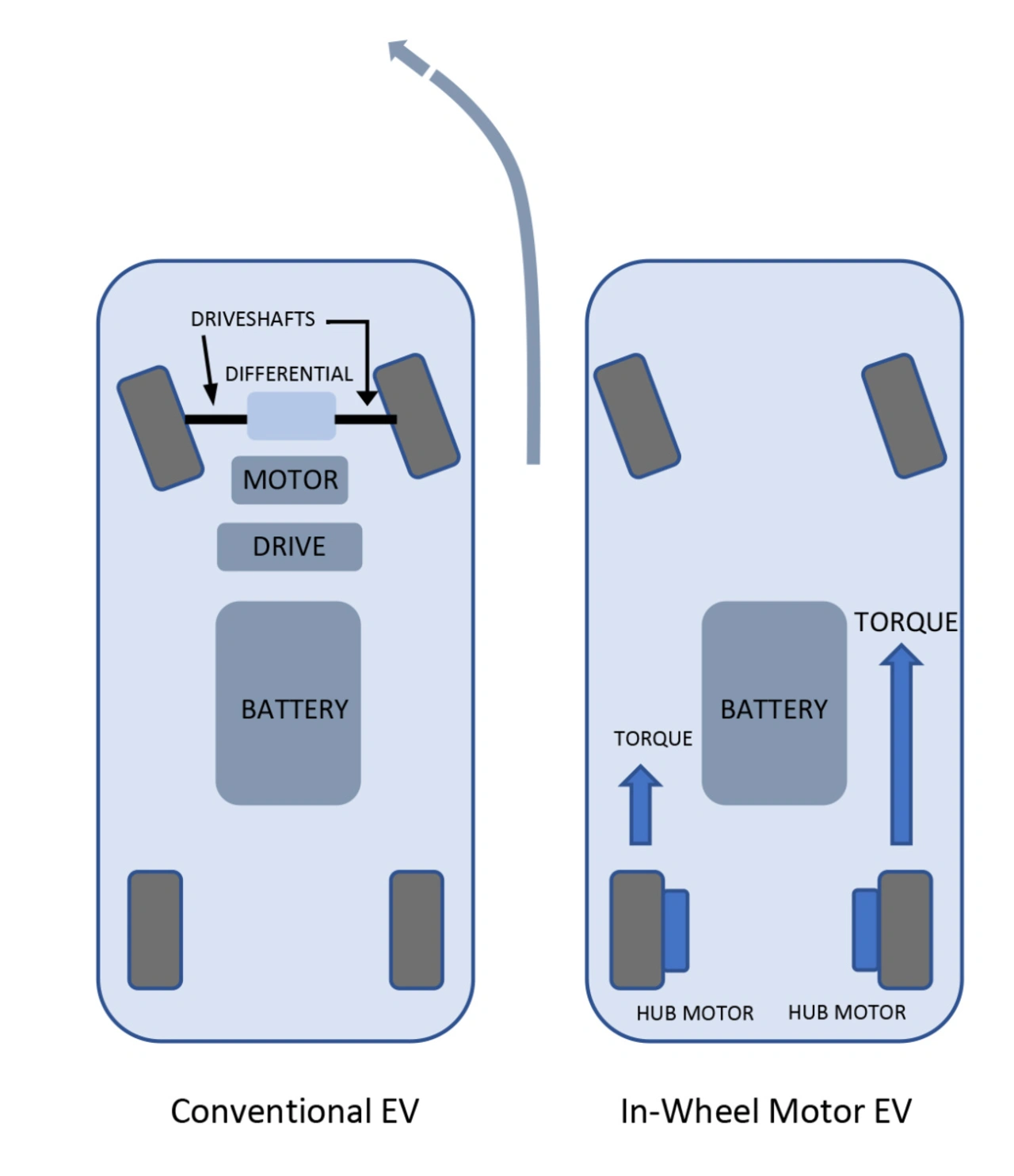
Wheel hub motors, on the other hand, can be individually controlled for torque, target wheel speed and braking power, responding to sensors at each wheel and driver input. Called torque vectoring, power can be applied separately to each wheel to ensure optimal handling and safety (Figure 2). Although the wheel hub motor can provide braking by regeneratively converting the wheels' rotational energy into battery charge and reversing its torque, additional hydraulic/friction brakes are provided to prevent overloading the motor drive during heavy braking.
However, wheel hub motors also have disadvantages: Multiple motors are needed, each with its own electronic drive, and the overall cost is higher than a single motor for the same output power. However, it can be argued that the energy savings will eventually pay for themselves, and the other safety and performance benefits, as well as the extra space inside the vehicle and range, are also positive.
There are practical issues, however, because a hub motor is now part of the vehicle's »unsprung weight,« that is, the components that are not supported by the suspension. This certainly affects handling, but tests have shown that the effect is not troublesome in normal driving, up to certain weight limits. The wheel hub motor, electronic drive and mechanical components are also in a harsher operating environment compared to a single motor enclosed in the chassis and cushioned by coil springs and dampers.
The most demanding environment
Unsprung components in a vehicle are in probably the most demanding situation imaginable: they are subjected to shock and vibration on the road, get road grime, and are exposed to corrosive elements such as water and salt from street cleaning. The surrounding friction brakes can get red-hot, and a wheel hub motor and its drive electronics, efficient as they are, also generate significant heat.
To ensure long life and reliable operation, the wheel hub motor and its components must be designed to be particularly robust. A failure that leads to blocking or even sudden loss of traction can have fatal consequences. With regard to functional safety, the quality standards of the automotive industry naturally apply, i.e. ISO 26262. In addition, the systems must achieve Automotive Safety Integrity Level (ASIL) D, i.e. the highest category.
Individual components must be certified accordingly: AEC-Qxx for passive and active electronics from automotive-qualified suppliers that meet ISO/TS-16949 quality standards for design and manufacturing with a Production Part Approval Process (PPAP).
The drive electronics factor
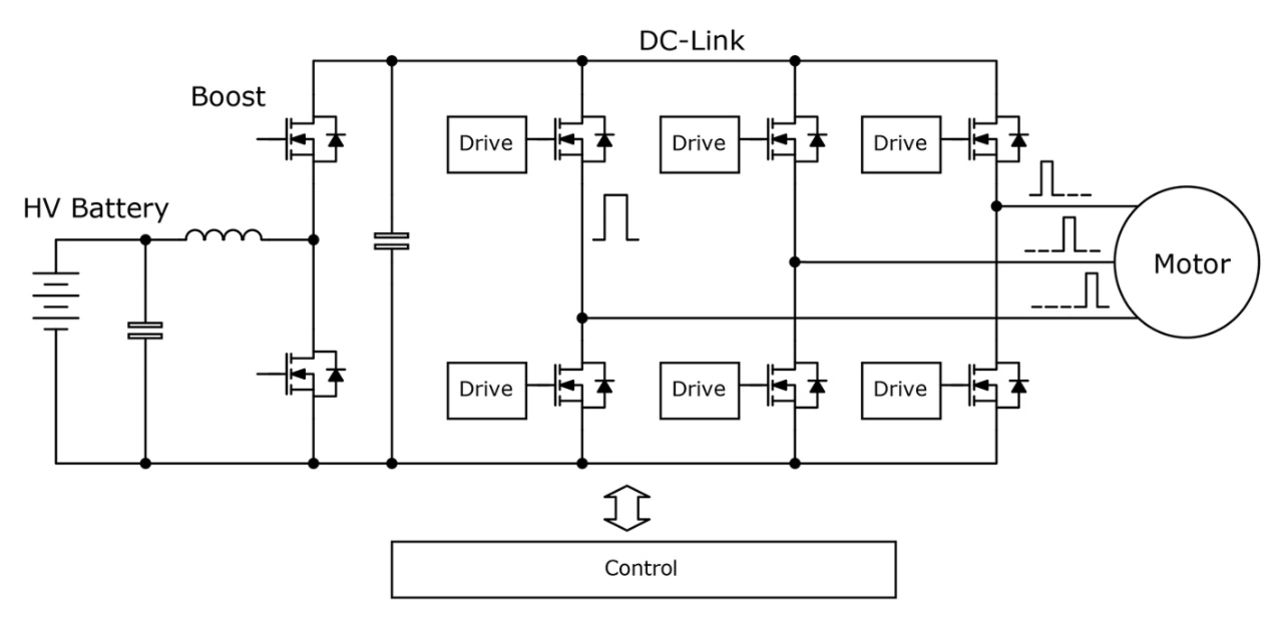
Technological advances have led to smaller motors, but at the same time, drive electronics represent a size and weight factor when installed in a hub. The traction motors used are usually permanent magnet synchronous motors (PMSMs) that require a three-phase variable frequency drive controlled by a "bridge" arrangement of semiconductor circuits with pulse width modulation (PWM). The bridge is switched at high frequency, with the effective output amplitude set by the pulse width representing the torque demand (Figure 3).
Following the usual conservative approach, electric vehicle designs have predominantly used IGBTs as switching modules. This technology was first introduced in the 1960s and although it has been refined over the years, the clock frequency of the bridge PWM is limited for reasonable efficiency due to the losses incurred when switching the device: A higher frequency means more transitions per second, resulting in more losses.
Therefore, motor drives, especially at high power, often switch at less than 10 kHz, resulting in relatively high ripple voltages and currents, poorer motor control response, and difficult-to-filter differential and spurious currents. The limited maximum efficiency is also reflected in a larger heat sink required and the resulting high weight in a hub motor drive.
To achieve faster switching and the associated control and EMC benefits, while also increasing efficiency and thus reducing volume and weight, new semiconductor circuit technologies are being applied to wheel hub motors. Silicon carbide MOSFETs (SiC MOSFETs) are a common choice because it is a wide bandgap device - conduction losses are low, operating temperature is high, and the device can switch very quickly with very low losses, enabling PWM frequencies of tens of kHz.
SiC can switch in the MHz range, but this does not provide any significant advantage in motor control, unlike in general power supply applications where transformer size can be significantly reduced. A feature of bridge circuits for motor control is that »commutation« occurs - current flows in the opposite direction to normal during the dead time of the switch and during regeneration. To make this possible, the IGBTs must be supplemented with a fast parallel diode.
For SiC MOSFETs, however, there is an integrated body diode that can perform this function, although it can be bypassed by an external diode for maximum efficiency. SiC MOSFETs are available with appropriate voltage and current ratings for the highest projected battery voltages and hub powers, which are currently around 80 kW. For a single chassis-mounted motor, the electronic drive must deliver full vehicle power, perhaps hundreds of kW, so the choice between IGBTs and SiC MOSFETs is not so clear-cut - with IGBTs being more common at high current ratings.
Automotive-grade SiC MOSFETs, IGBTs and other active components from manufacturers such as Infineon, STMicroelectronics, Texas Instruments and Wolfspeed Cree, as well as a large portfolio of passive and electromechanical components, are available in the Mouser Electronics range.
Literature
[1] https://www.greencarcongress.com/2008/12/michelin-to-com.html
[2] https://www.nissan-global.com/EN/ZEROEMISSION/HISTORY/BLADEGLIDER/
[3] https://www.proteanelectric.com/
The author
Mark Patrick
is Technical Marketing Manager for EMEA at Mouser Electronics, responsible for the creation and distribution of technical content in the region. Prior to leading the technical marketing team, Patrick was part of the EMEA supplier marketing team and played a key role in building and developing relationships with manufacturing partners. Prior to joining Mouser, Patrick worked for Texas Instruments for eight years in application support and technical sales. He is an engineer at heart with a passion for vintage synthesizers and motorcycles. He is also not afraid to perform repairs on them himself. Patrick graduated from Coventry University with a degree in Electronic Engineering.
